

Distributed multi-AGV collision-free path planning method based on improved A* algorithm
A path planning and distributed technology, applied in road network navigators, navigation, instruments, etc., can solve management center management and calculation pressure bottlenecks, and achieve the effect of solving conflicts and reducing the number of turns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
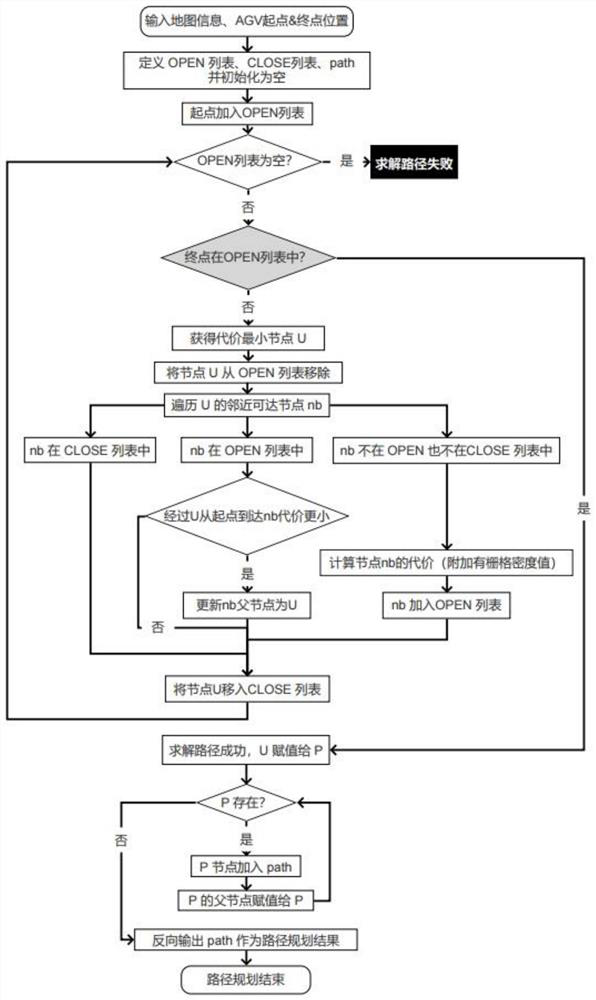
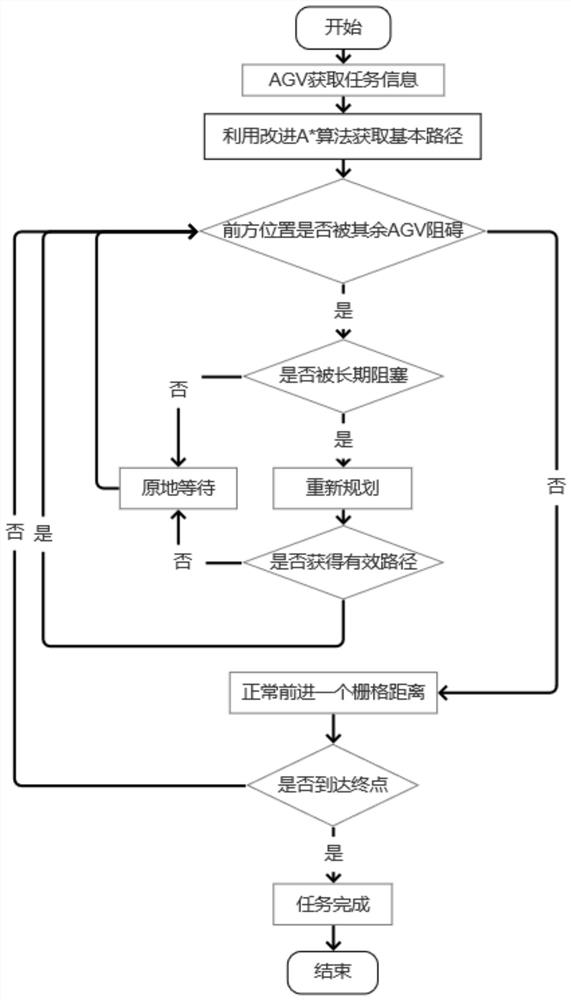
[0033] The invention provides a distributed multi-AGV collision-free path planning method based on the improved A* algorithm. By establishing a resource scheduling strategy in the logistics system and an AGV transport vehicle path planning method, multiple AGVs can be achieved with the shortest time as the goal. The conflict-free and efficient operation of AGVs avoids collisions and deadlocks, reduces the number of turns as much as possible, and cooperates to complete the sorting task. figure 2 Shown is the process flow of the distributed multi-AGV collision-free path planning method based on the improved A* algorithm proposed by the present invention. The specific implementation includes the following steps:
[0034] Step 1. Use the grid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More