

A trajectory tracking control method for parallel robots based on exponential reaching rate
An exponential approach rate and trajectory tracking technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of inconvenient control and low control accuracy of parallel robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
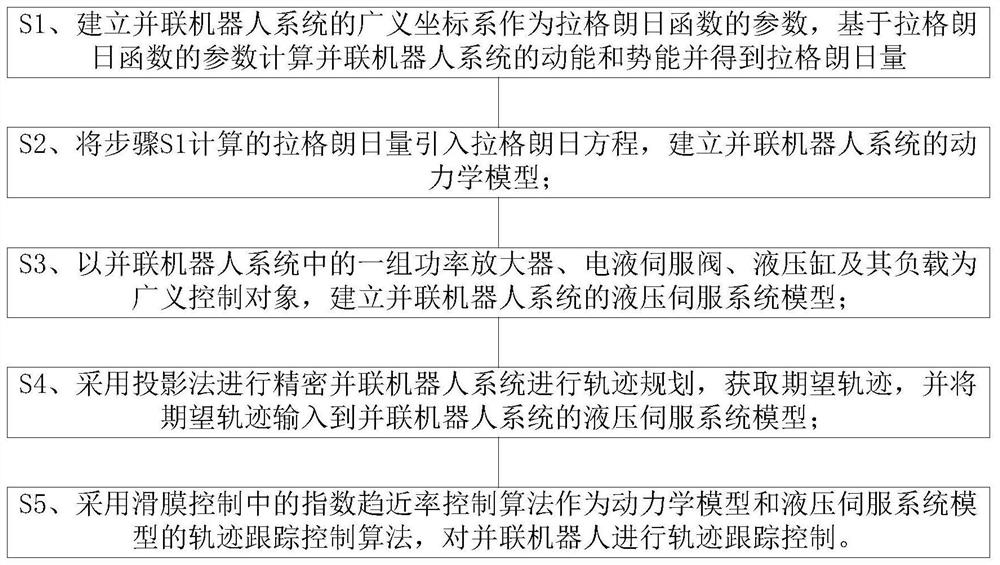
[0051]A trajectory tracking control method for parallel robots based on exponential approach rate, basically as attached figure 1 shown, including the following steps:
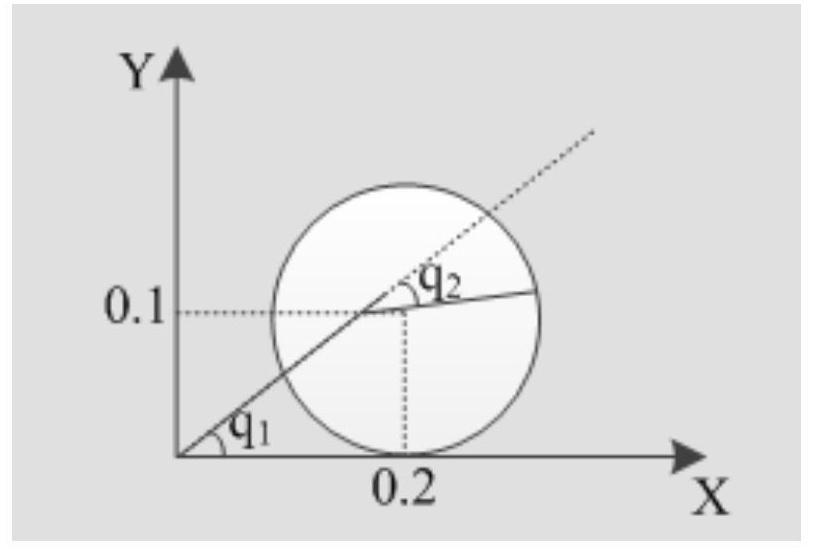
[0052] S1. Establish the generalized coordinate system of the parallel robot system as the parameter of the Lagrangian function, calculate the kinetic energy and potential energy of the parallel robot system based on the parameter of the Lagrangian function and obtain the Lagrangian quantity;
[0053] The parallel robot system includes a connecting rod, a moving platform and a fixed platform, and a rotary joint that is arranged at the end of the connecting rod and is connected with the moving platform and the fixed platform respectively; in this embodiment, the connecting rod, the moving platform and the fixed platform The parallel robot system composed of platforms has six groups of the same hydraulic drive servo system, so n=6, each group of hydraulic drive servo system includes power amplifier, electro-hydr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More