Active regulation and control method for tooth profile deviation of gear involute template
An involute and tooth profile technology, applied in the field of precision machining and testing, can solve the problems of not introducing the precision and machining method of the gear involute model, not meeting, not involving tooth profile shape deviation, etc., and achieving a good market application prospect The effect of promoting value, ensuring consistency, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
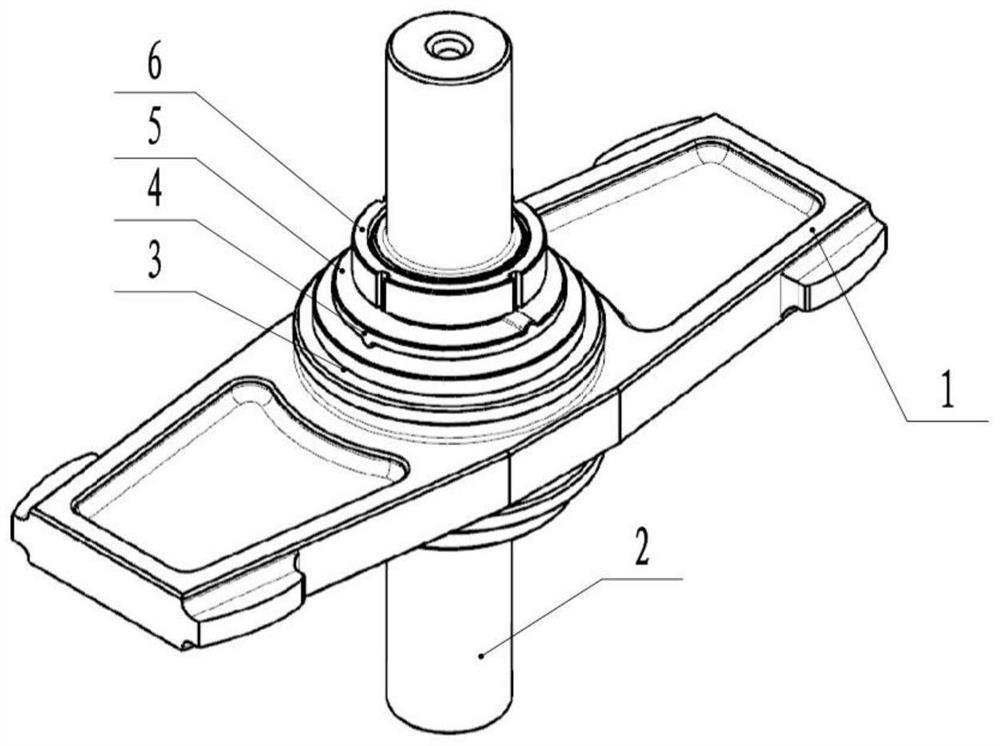
[0038] Take the initial base circle radius r b =100mm, value range 5~65mm, value length L α =60mm gear involute model 1 as an example, set forth the specific implementation of the invention:
[0039] The tooth surface to be regulated is a single tooth surface, that is, when the tooth surface to be regulated is A1-1:
[0040] The first step is to measure the initial tooth profile inclination deviation f of the tooth surface A1-1 to be controlled Hα =3.2μm, initial profile shape deviation f fα = 1.1μm, and separate the initial profile shape deviation f fα The profile crown deviation C in α = 0.3 μm;
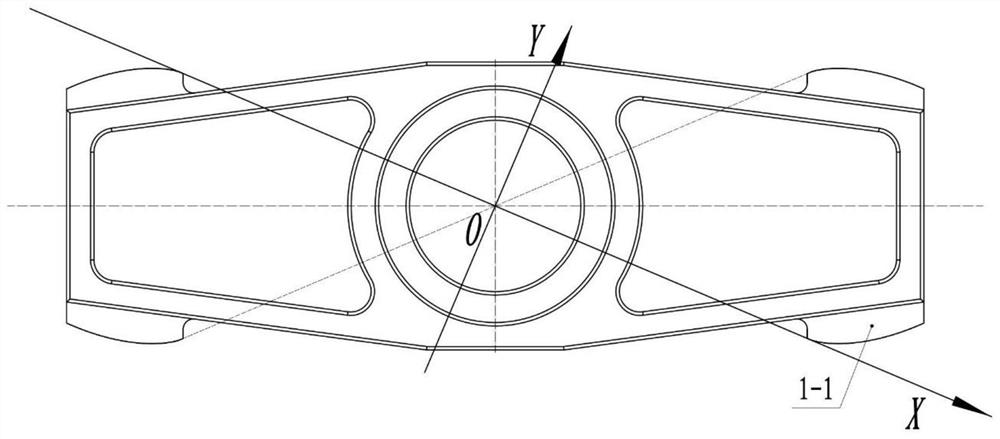
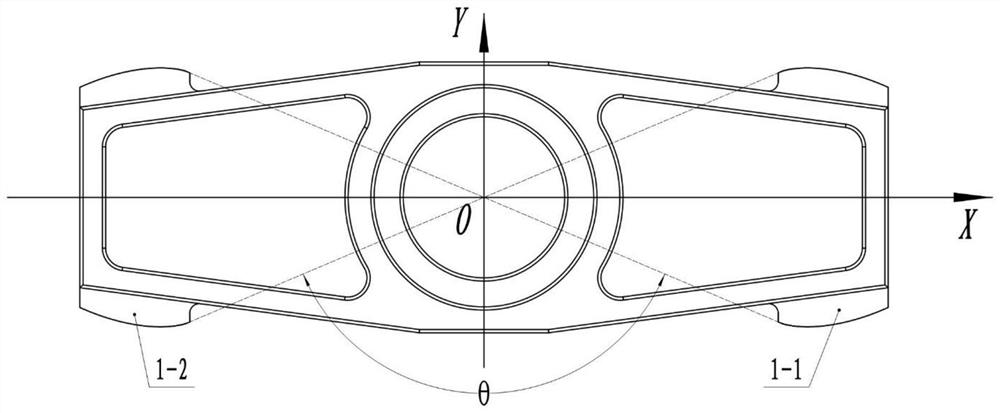
[0041] In the second step, take the center of the initial base circle as the origin, and take the line connecting the initial base circle center and the involute at the base circle as the X-axis to establish a right-handed coordinate system, and use the installation eccentricity e of the gear involute template 1 along the Y-axis direction y Control tooth profile shape deviation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



