

Path planning method, device, computer equipment and storage medium
A path planning and path technology, applied in computing, data processing applications, forecasting, etc., can solve the problems of high energy consumption, waste of resources, and low data collection efficiency of UAVs, to improve effectiveness and quality, save time and energy. consumption, improve efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
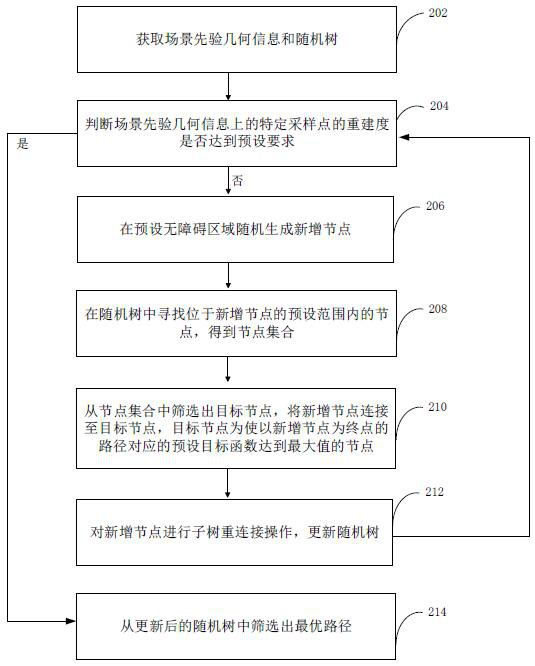
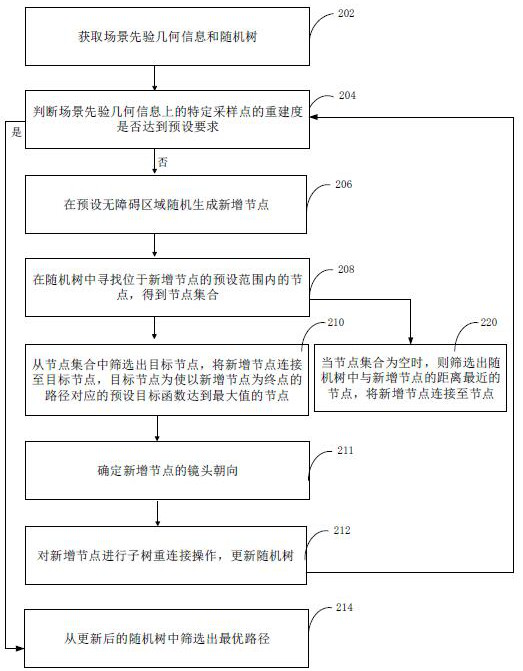
[0074] In one embodiment, such as figure 1 As shown, a path planning method is provided, and this embodiment is described by taking the method applied to a server as an example. It can be understood that the method can also be applied to a terminal, and can also be applied to a system including a terminal and a server, and can be implemented through interaction between the terminal and the server. The path planning algorithm provided by this application can be planned based on UAVs or ground robots. It mainly focuses on drones equipped with multi-lens cameras and single-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More