Fruit and vegetable picking manipulator, picking robot and picking method of picking robot
A technology of manipulator and robot base, which is applied in the fields of picking machines, agricultural machinery and implements, chemical instruments and methods, etc., can solve problems such as failure to fix fruits and vegetables well, accidental injury of fruits and vegetables, and influence on the quality of fruit and vegetable picking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the above objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings. In the following description, numerous specific details are set forth in order to provide a thorough understanding of the present invention. However, the present invention can be implemented in many other ways different from those described here, and those skilled in the art can make similar improvements without departing from the connotation of the present invention, so the present invention is not limited by the specific implementations disclosed below.
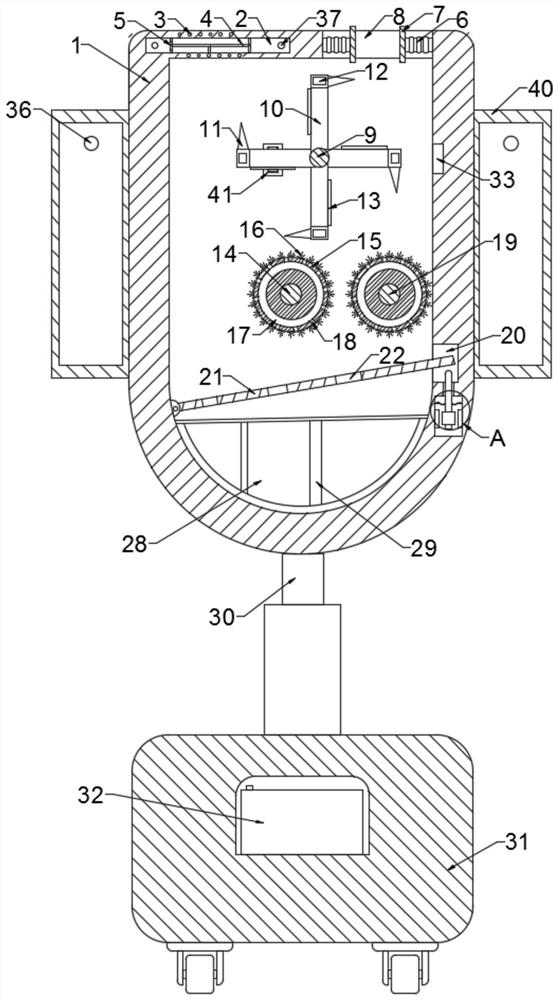
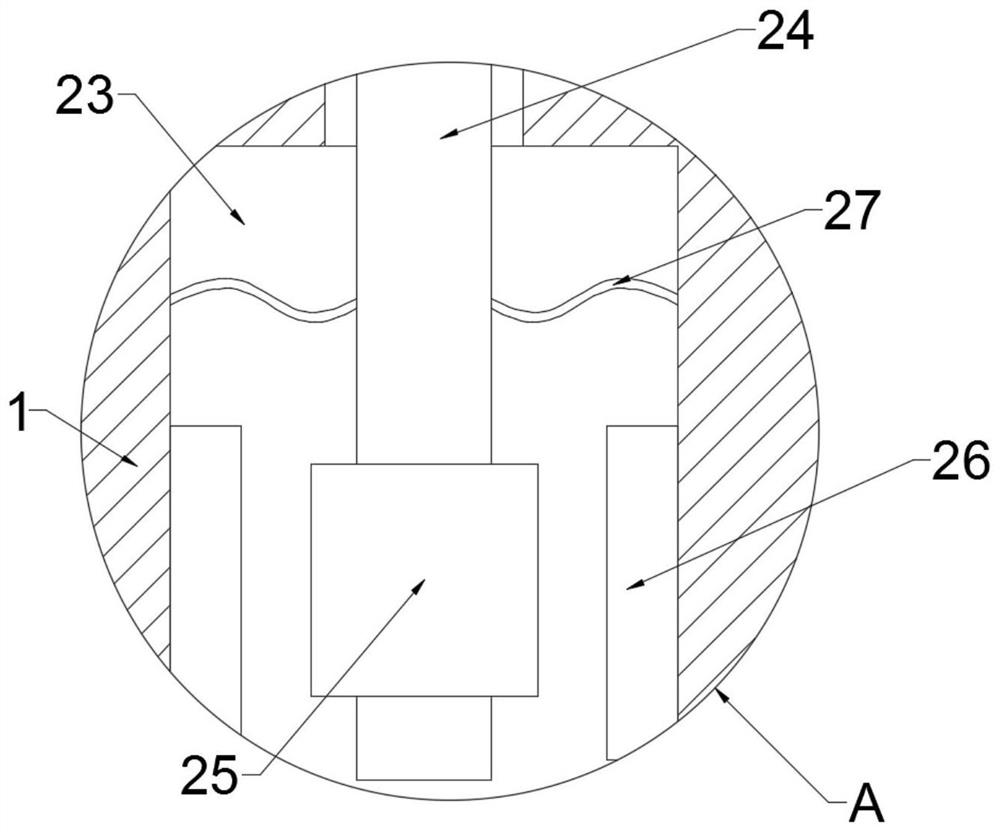
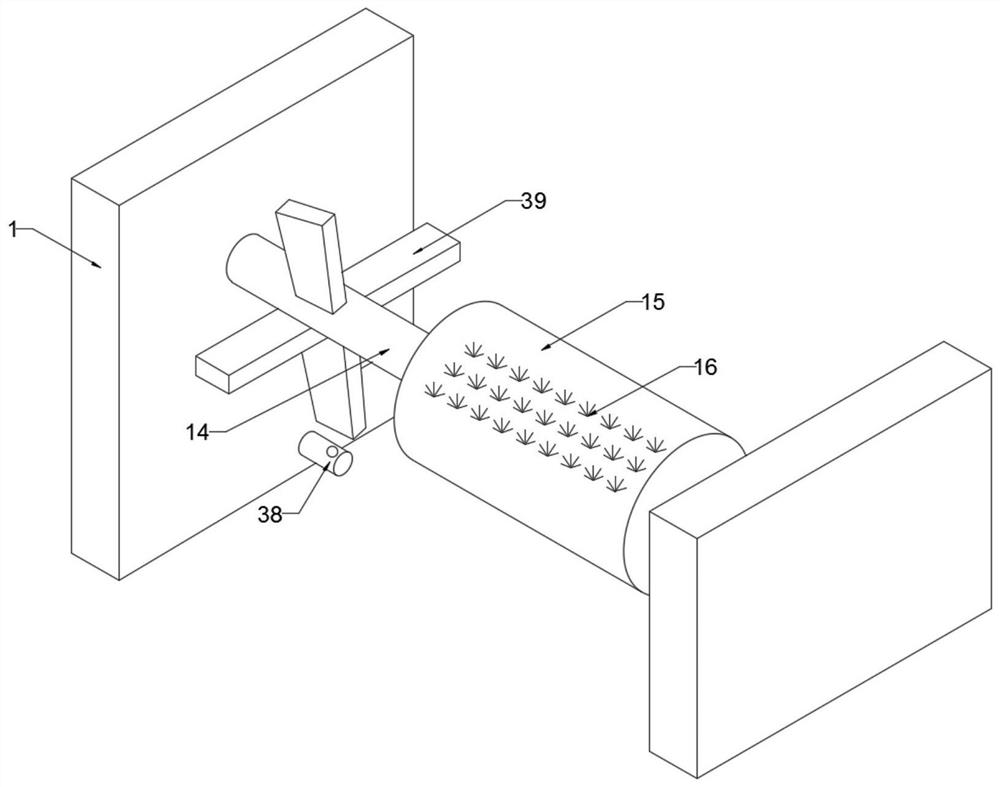
[0030] refer to Figure 1-5 , a fruit and vegetable picking manipulator, comprising a manipulator body, the manipulator body comprising a manipulator shell 1, four mechanical claws 10 and two rollers 15, the top wall of the manipulator shell 1 is provided with a sliding cavity 2, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More