

Body surface positioning device for neurosurgery
A neurosurgery and positioning device technology, applied in the field of medical equipment, can solve problems affecting the operation process and postoperative recovery, anatomical line drawing errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
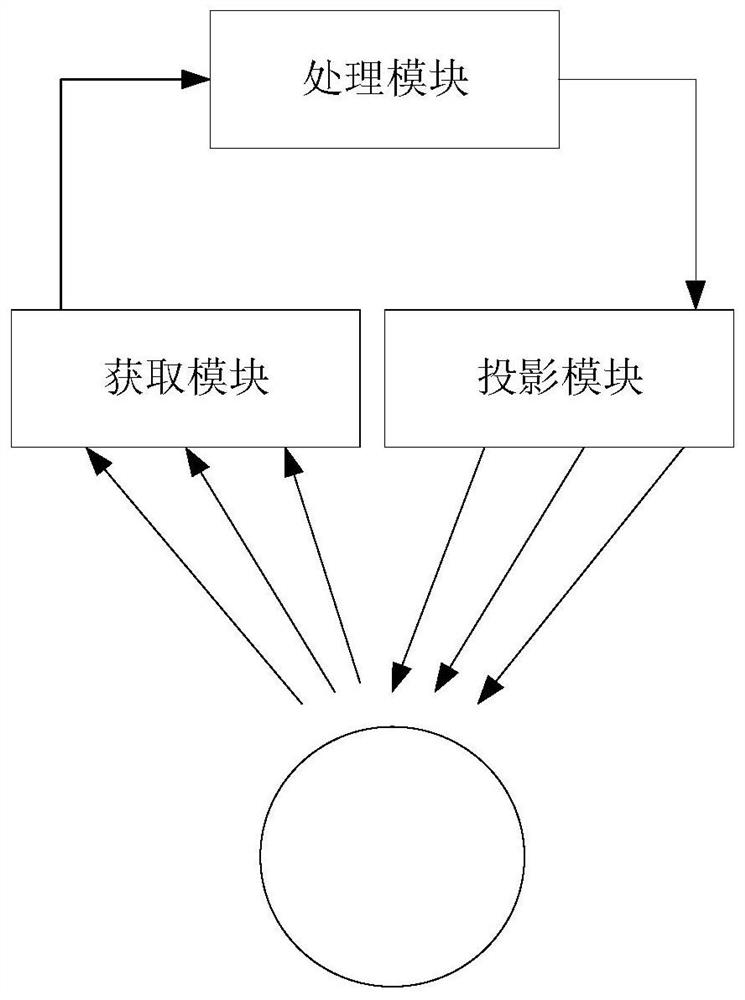
[0025] like figure 1 As shown, the body surface positioning device for neurosurgery provided by the present invention includes:
[0026] The acquisition module is used to acquire the three-dimensional image of the place to be dissected; the processing module includes a processor, a controller and a memory. The memory is configured to: store the medical image; the processor is configured to: fit the received three-dimensional image to the medical image, and if the correlation is greater than a set threshold, the fitting is completed; otherwise, re-fitting; the controller is configured to: receive The three-dimensional image, and the fitted image signal is transmitted to the projection module; the projection module is connected to the processing module signal, and is set in the same direction as the acquisition module, and is used to project the received image signal, and the anatomical line at the place to be dissected projected onto the patient's body.
[0027] The present i...
Embodiment 2
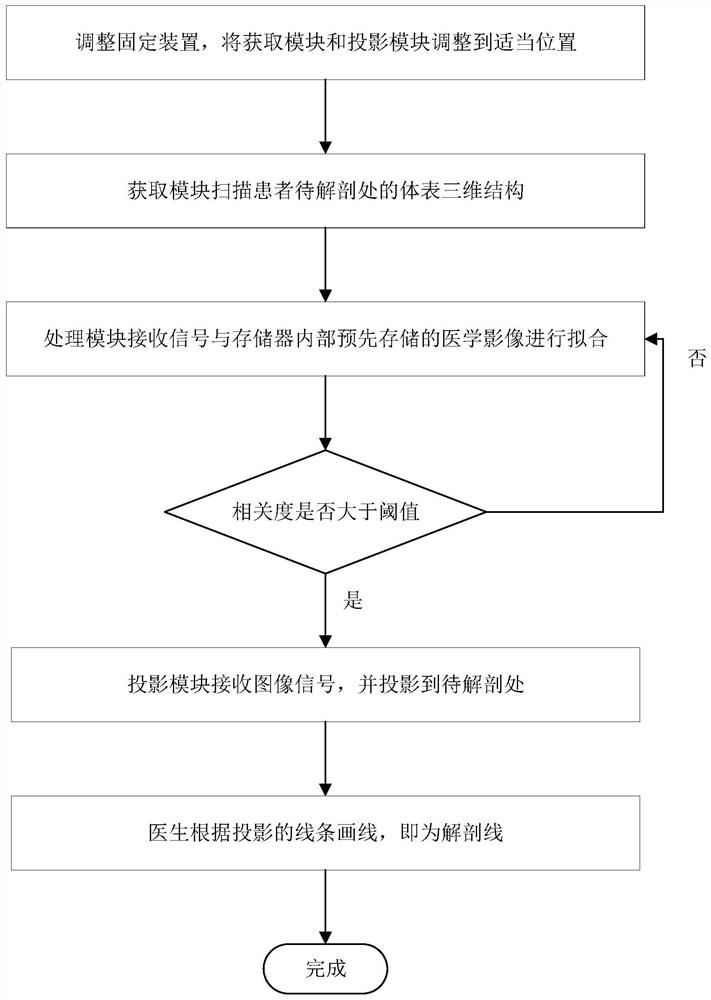
[0036] to combine figure 2 As shown, the method for using the body surface positioning device for neurosurgery in the present invention comprises the following steps:
[0037] Adjust the fixing device to adjust the acquisition module and projection module to a proper position;
[0038] The acquisition module scans the three-dimensional structure of the body surface of the patient to be dissected;
[0039] The processing module receives the signal and performs fitting with the pre-stored medical images in the memory. If the correlation is greater than the threshold, the fitting is completed, otherwise, it is re-fitted;
[0040] The projection module receives the image signal and projects it to the place to be dissected;
[0041] Doctors draw lines based on the projected lines, which are anatomical lines.
[0042] The present invention is provided with an acquisition module, a processing module and a projection module. The projection module can directly project the line fitt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More