

Robot chassis capable of being switched between steering wheel and universal wheel
A technology of universal wheels and robots, which is applied to electric steering mechanisms, motor vehicles, transportation and packaging, etc. It can solve the problems of being unable to turn freely, not installing a profiling mechanism, and being unable to apply to complex terrains, etc., to achieve strong versatility and drag The effect of convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with specific embodiments.
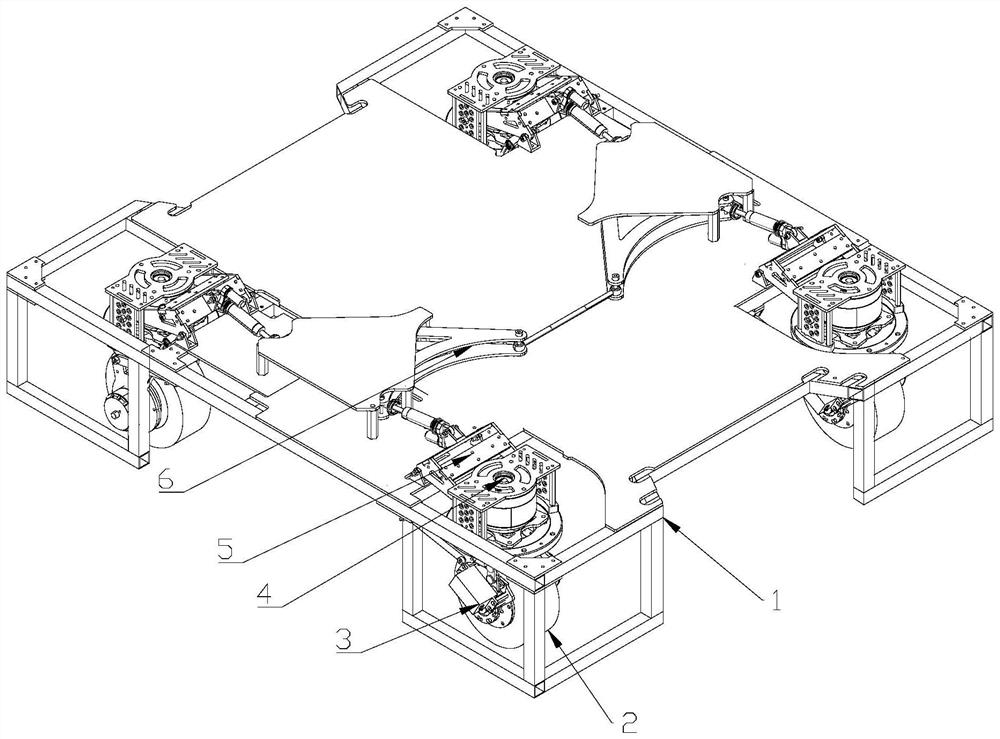
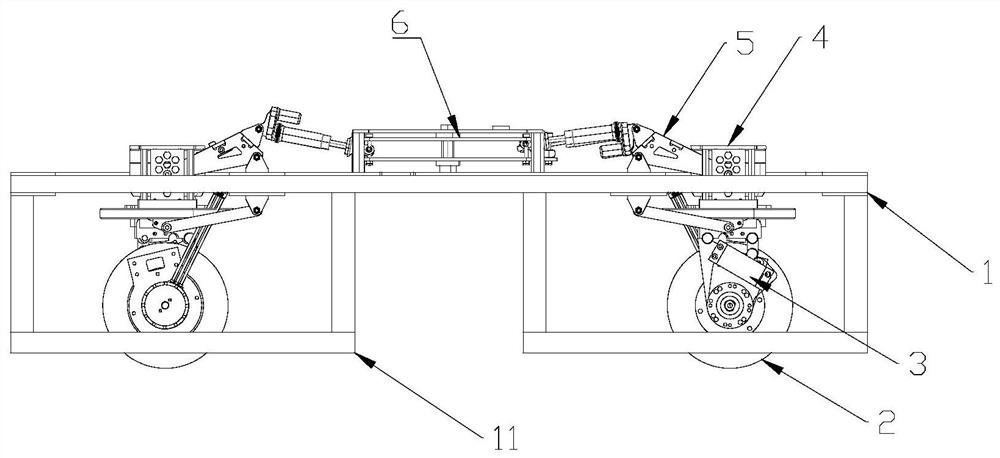
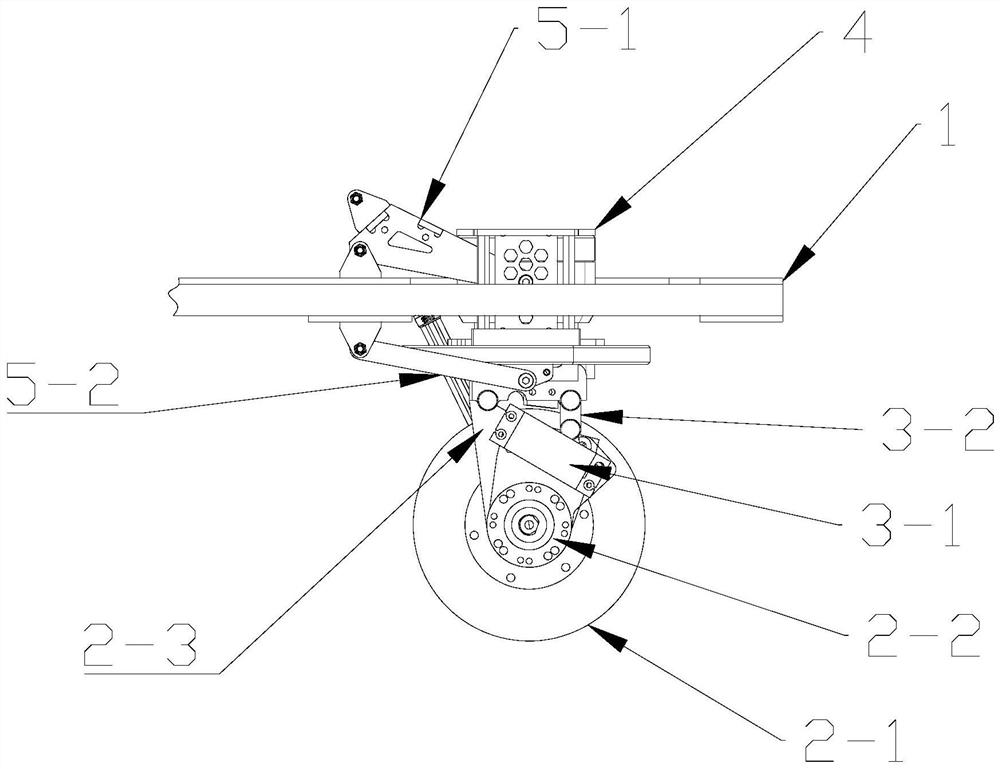
[0030]A robot chassis that can switch between the steering wheel and the universal wheel, including the chassis frame, four switching mechanisms, four wheel sets, and four steering mechanisms; the four switching mechanisms are respectively installed on the four wheel sets, and the four wheel sets They are respectively connected to the chassis frame through four steering mechanisms;
[0031] The wheel set includes a hub, a wheel bracket, a drive motor, and a flange coupling; the switching mechanism includes a steering gear and a switching lever; the wheel bracket includes a mounting plate, a connecting plate, and a first rotating shaft; the wheel hub and the mounting plate are rotationally connected, and the connecting plate is connected to the steering wheel Mechanism connection, the mounting plate and the connecting plate are rotationally connected through the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More