

Autonomous pose measurement method based on SLAM technology
A kind of pose measurement and technology, which is applied to measurement devices, navigation through velocity/acceleration measurement, mapping and navigation, etc., can solve problems such as difficult adaptation of SLAM, and achieve correction of long-term pose offset and reduction of attitude and positioning errors. , the effect of high application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
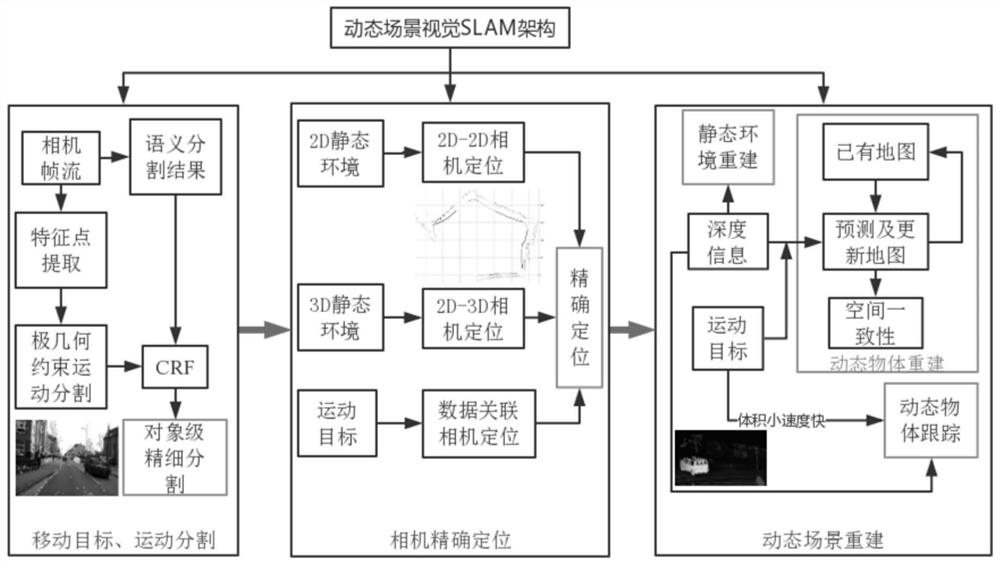
[0097] Such as figure 1 As shown, Embodiment 1 of the present invention proposes an autonomous pose measurement method based on SLAM technology. This method mainly involves three key technologies: dynamic and static separation technology for highly dynamic scenes, high-precision autonomous positioning technology for multi-source data fusion, and virtual-real scene construction and consistency matching technology.
[0098] 1. Dynamic and static separation technology for high dynamic scenes
[0099]Due to the introduction of dynamic environments, various modules such as visual SLAM positioning, map construction, and loop detection will be affected to varying degrees. The movement patterns of different moving objects are different, resulting in the existence of multiple moving object solution spaces in each link of the SLAM module. This patented technology avoids directly solving the positioning of multi-movement patterns in dynamic scenes and the three-dimensional modeling equa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More