

Exoskeleton movement collaboration method based on long and short term memory network
A long-short-term memory and exoskeleton technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as staying in the simulation stage, and achieve the effect of solving motion lag. The method is simple and easy to implement, and is suitable for popularization and use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
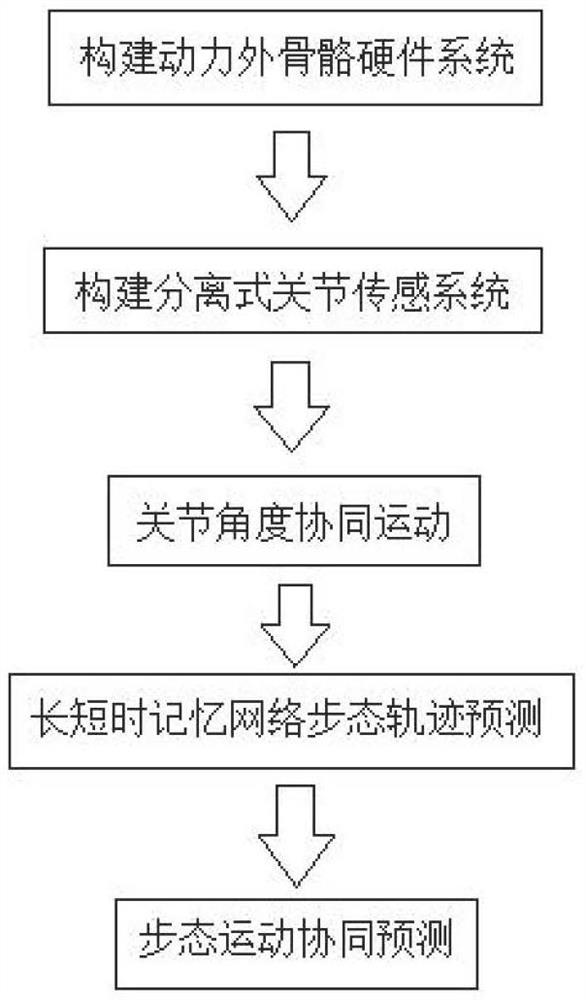
[0037] In this example, see figure 1 , an exoskeleton movement coordination method based on long short-term memory network, the operation steps are as follows:
[0038] a. Build a powered exoskeleton hardware system,
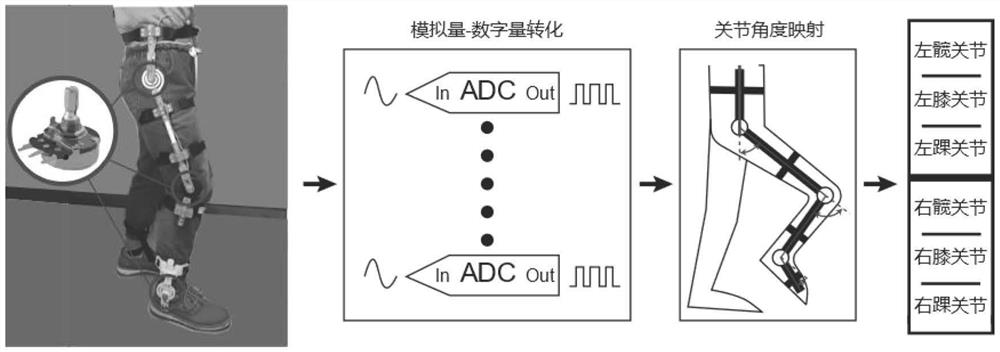
[0039] b. Build a separate joint sensing system,
[0040] c. joint angle joint movement,
[0041] d. Long-short-term memory network gait trajectory prediction,
[0042] e. Gait-motion co-prediction.
[0043] In this embodiment, the gait trajectory prediction method is used to establish the gait trajectory data of the powered exoskeleton moving with the human body, and on this basis, the gait trajectory of the powered exoskeleton system is calculated using the LSTM network updated based on real-time observation values predict.
Embodiment 2
[0045] The second embodiment is basically the same as the first embodiment, and the special features are:
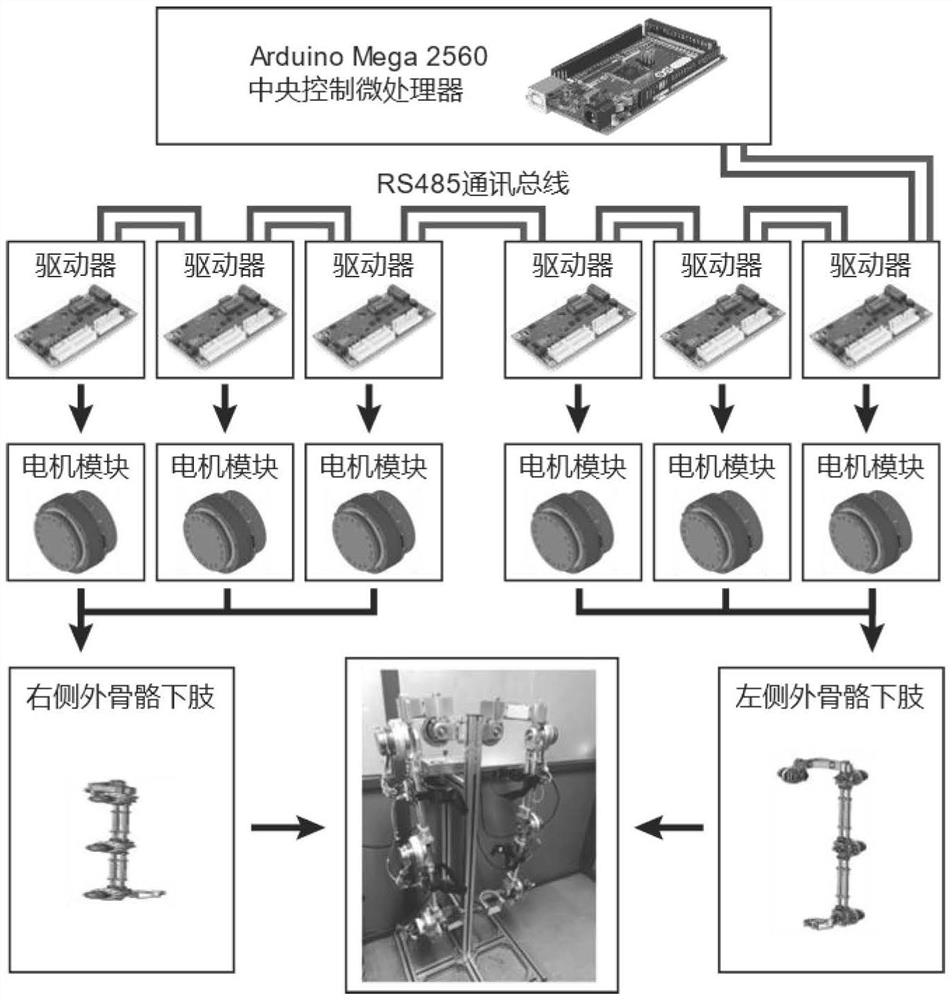
[0046] (1) In this embodiment, the step a builds a powered exoskeleton hardware system.
[0047] The hardware system architecture of the powered exoskeleton, except that the degree of freedom of extension and retraction at the left and right hip joints is a passive degree of freedom without motor drive, the degrees of freedom of flexion and extension of the left and right hip joints, the degree of freedom of knee joint flexion and extension, and the degree of freedom of ankle joint flexion and extension are all equipped with corresponding The motor drive, that is, there are six active power joints; the hardware system mainly includes: central controller Arduino Mega2560, motor driver, Hall sensor, branch brushless motor, harmonic reducer, connecting rod parts processed by light aluminum alloy and additional The straps are used to couple with the wearer's body and carry t...
Embodiment 3
[0058] (1) In the present embodiment, the step a. powered exoskeleton hardware system:
[0059] This embodiment is based on the existing powered exoskeleton for corresponding research, and the overall architecture of its hardware system can refer to the attached figure 2 . Among them, except that the extension and retraction degrees of freedom at the left and right hip joints are passive degrees of freedom without motor drive, the left and right hip joint flexion and extension degrees of freedom, the knee joint flexion and extension degrees of freedom, and the ankle joint flexion and extension degrees of freedom are all equipped with corresponding motor drives, namely There are six active dynamic joints. The hardware system mainly includes: central controller Arduino Mega 2560, motor driver, Hall sensor, branch brushless motor, harmonic reducer, connecting rod parts processed by light aluminum alloy and additional straps for coupling with the wearer's body Attach and carry ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More