

Multi-unmanned aerial vehicle motion planning method based on artificial potential field method and MADDPG
An artificial potential field method and multi-UAV technology, applied in the field of multi-UAV motion planning, can solve the problems of too large joint space dimension, discrete action space, and too low dimension, so as to speed up the convergence rate and accelerate the Training speed, the effect of good application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
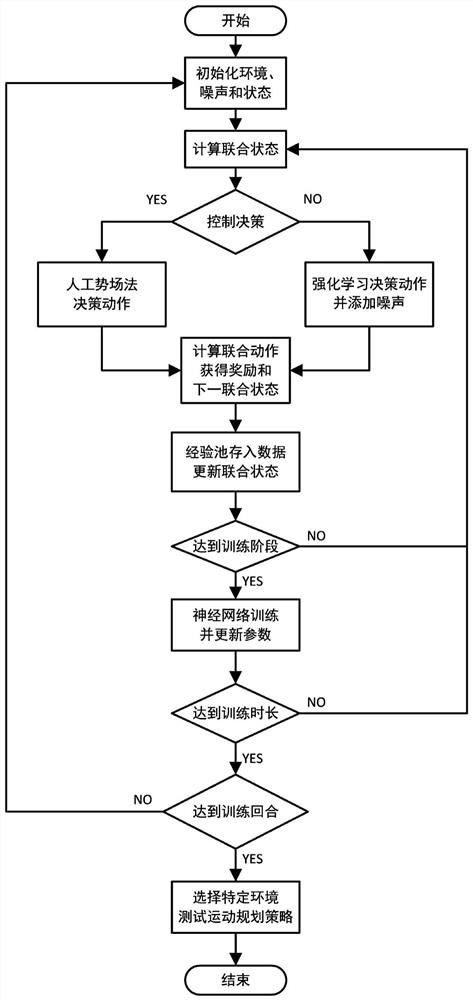
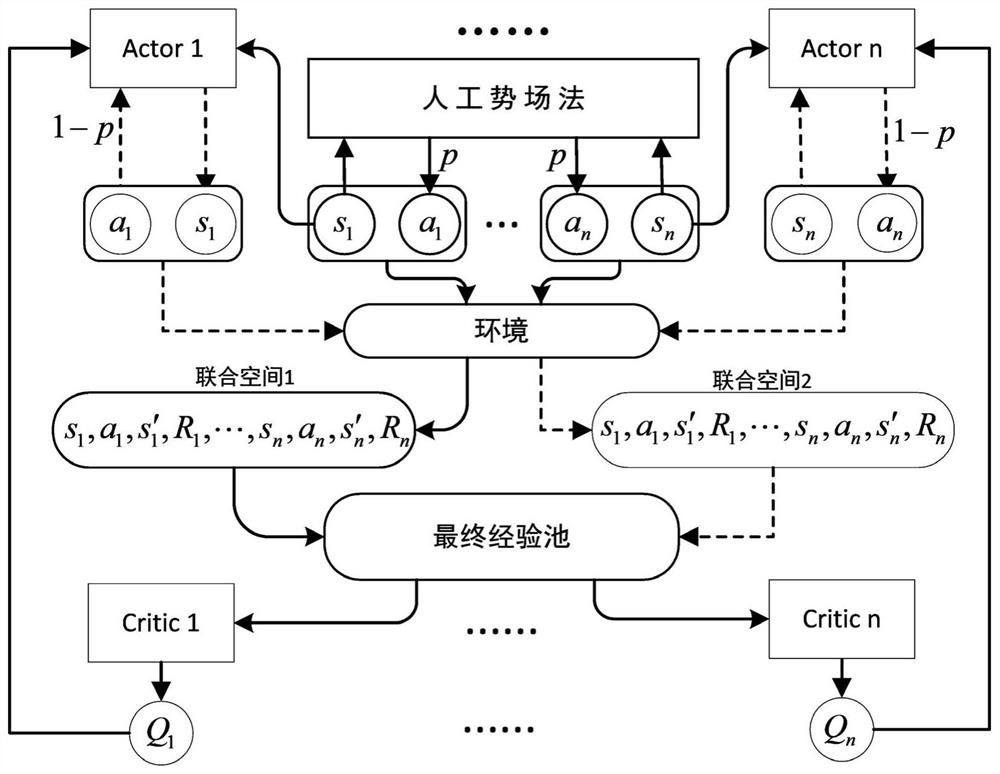
[0169] The multi-UAV motion planning method based on the artificial potential field method and MADDPG proposed by the present invention initializes the environment and neural network parameters at the beginning of each round, and then the multi-UAV selects actions to move and change positions to obtain a new state. And the experience of each round is saved in the experience pool as a learning sample, and the parameters of the neural network are updated iteratively. After the training is completed, the network parameters are saved and loaded to multiple UAVs in a specific environment for testing to verify the adaptability and efficiency of the planning strategy. In the training process of the present invention, the action selection depends on the parameter p. The probability of multi-UAV using the artificial potential field method to select an action is the parameter p, and the probability of using the exploration or strategy network to select the action is the parameter 1-p. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More