

Soft electrostatic adhesion coating type bionic octopus manipulator
An electrostatic adhesion and wrapping technology, which is applied in the field of soft electrostatic adhesion and wrapping bionic octopus manipulators, can solve the problems of large differences in electrostatic adhesion effects, unstable clamping performance, and insufficient clamping force. Achieve the effects of reducing the risk of damage, simple structure, and increasing clamping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0017] like figure 1 and 2 shown.
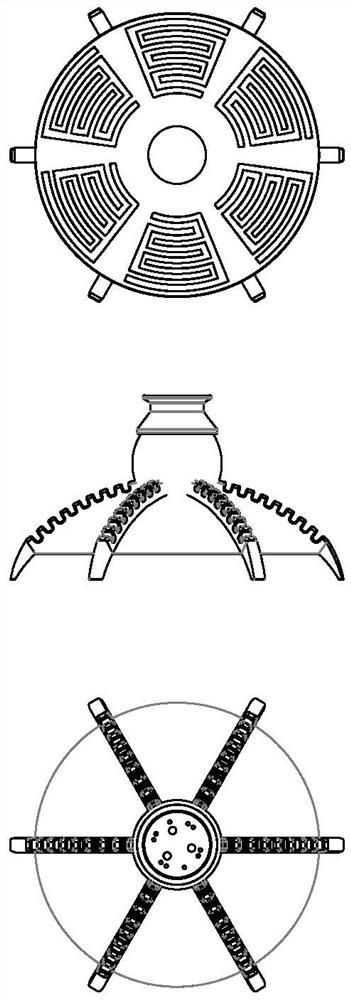
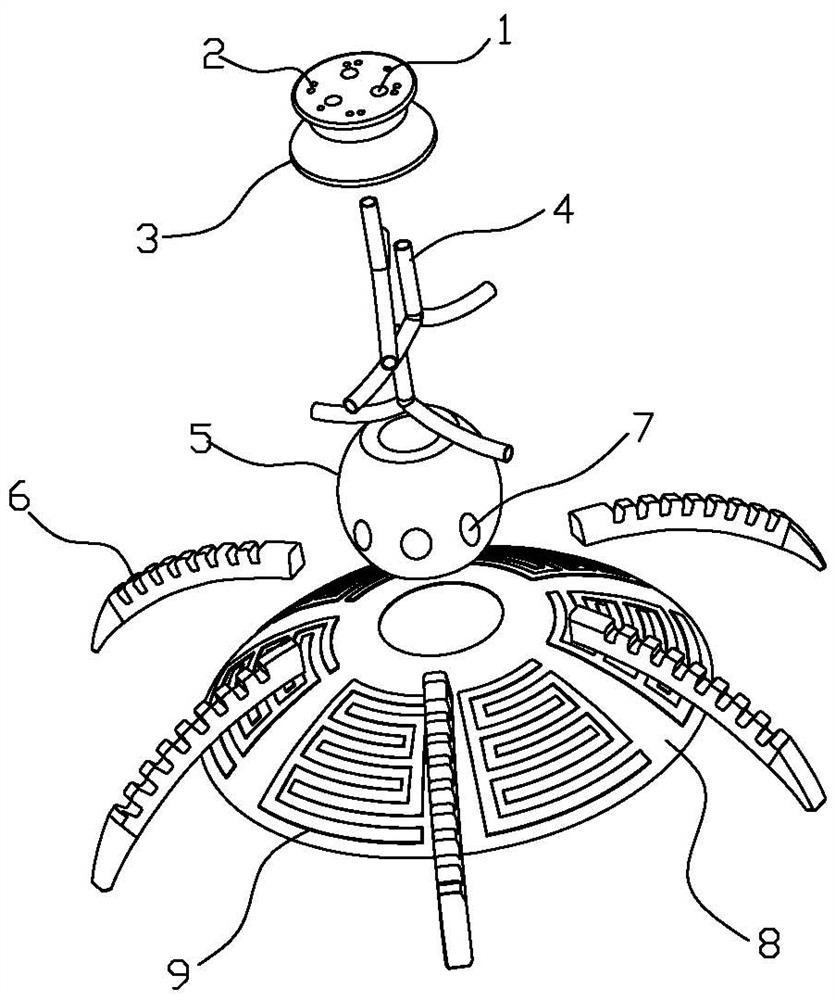
[0018] A soft electrostatic adhesion coated bionic octopus manipulator includes a connecting seat 3 , a main chamber 5 , claw fingers 6 and a coating 8 .
[0019] The connecting seat 3 is a hollow truncated cone, which can be made of metal or plastic. Its lower end is open, and its upper end surface is provided with a through inflation hole 1, which can be connected with an external air valve for inflating or pumping. There are three inflation holes 1, which are evenly arranged around the center of the connecting seat 3, which is convenient for production and installation.
[0020] The main chamber 5 is in the shape of a hollow drum and can be made of rubber. Its upper end is open and connected to the lower end of the connecting seat 3 . The periphery of the lower end of the main chamber 5 is provided with a plura...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More