A workshop goods grabbing manipulator
A technology for grasping manipulators and goods, applied in the field of manipulators, can solve problems such as high use limitations and reduced production efficiency, and achieve the effects of high safety, increased clamping distance, and easy clamping of goods of different specifications.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
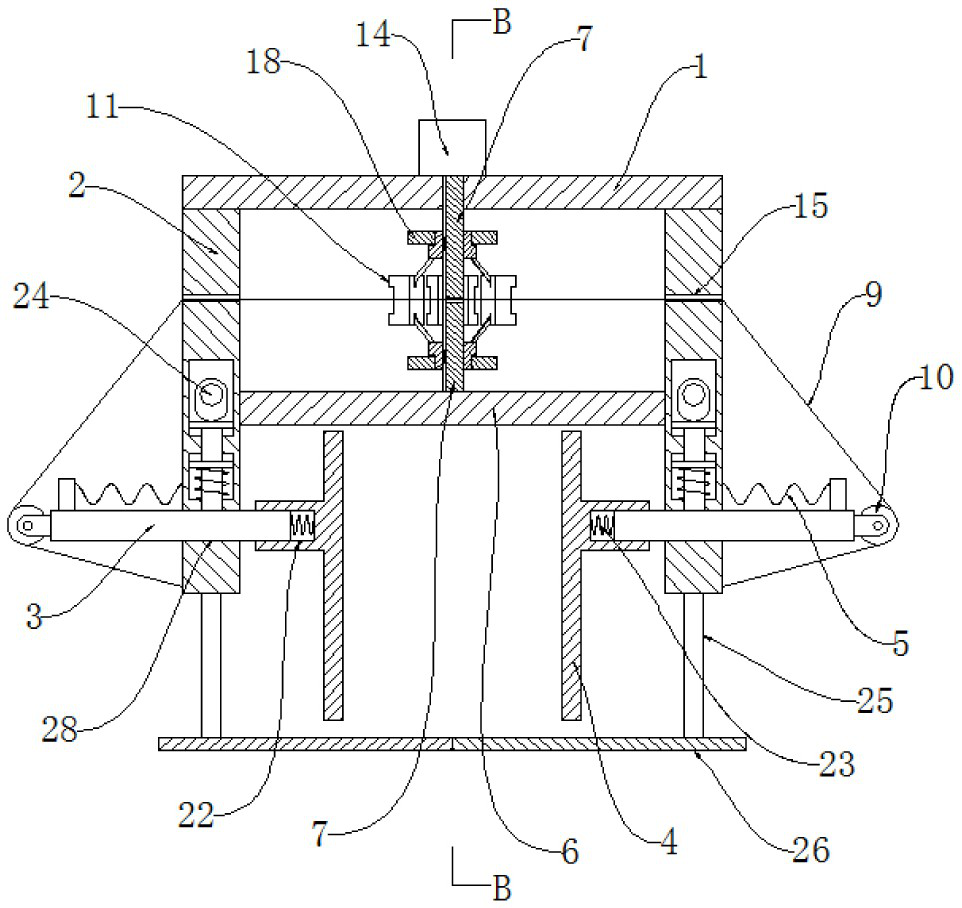
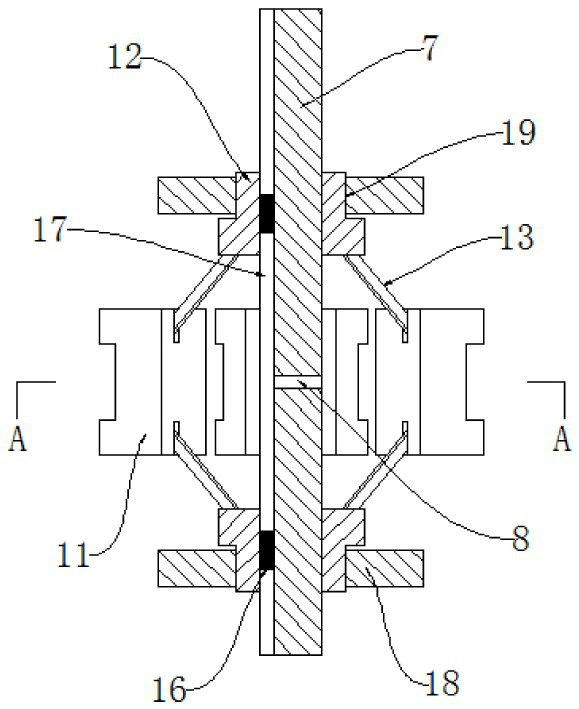
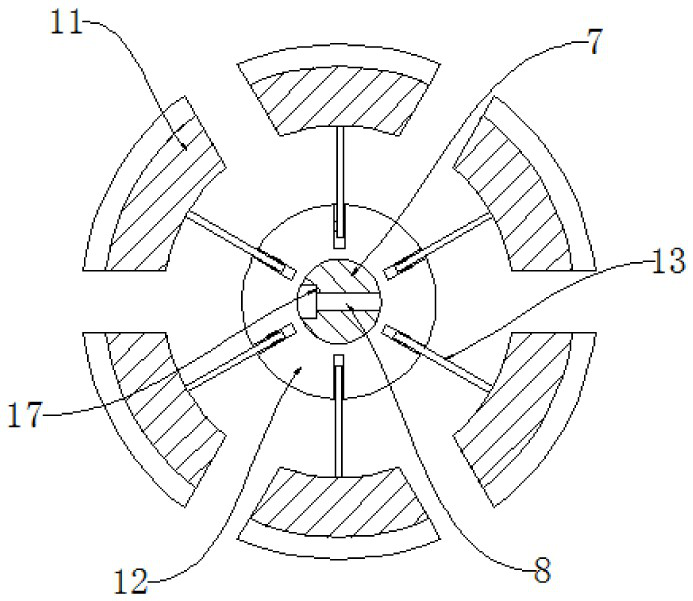
[0027] Such as Figure 1 to Figure 8 As shown, a workshop cargo grabbing manipulator includes a first mounting plate 1, side plates 2 are fixedly installed at the left and right ends of the bottom of the first mounting plate 1, and the two side plates 2 slide left and right respectively. A clamping arm 3 is installed, and one end of the clamping arm 3 is elastically connected with a clamping head 4 located between the two side plates 2, and one end of the clamping arm 3 away from the clamping head 4 is connected to the clamping head 4. A return spring 5 is connected between the corresponding side plates 2; a second mounting plate 6 above the clamping head 4 is fixedly installed between the two side plates 2, and the first mounting plate 1 A vertical shaft 7 is installed in rotation with the second mounting plate 6, and a horizontally extending threading hole 8 is provided on the vertical shaft 7, and a steel wire rope 9 is arranged in the threading hole 8, and the left and rig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More