

Target recognition method and system for intelligent transfer robot
A target recognition and intelligent handling technology, applied in character and pattern recognition, instruments, manipulators, etc., can solve problems such as color recognition errors, achieve the effects of enhancing adaptability, improving recognition accuracy, and accelerating convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] Next, the technical scheme in the embodiment of the present invention will be described in conjunction with the embodiment of the present invention, and is clearly, and it is understood that the described embodiments are merely the embodiments of the present invention, not all of the embodiments. Based on the embodiments in the present invention, those of ordinary skill in the art are in the range of the present invention without making creative labor premistence.
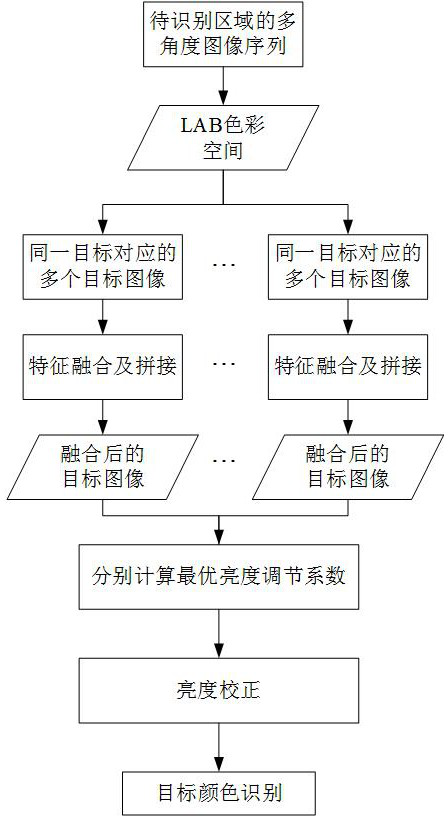
[0062] See figure 1 The present invention discloses an intelligent handling robot target recognition method, the method comprising:
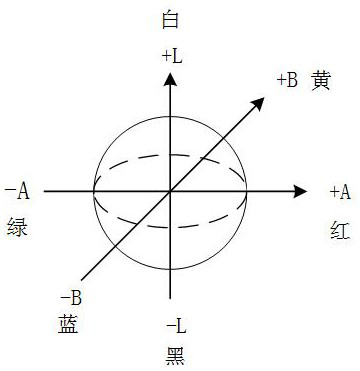
[0063] S1, obtain the multi-angle image sequence of the robot to be identified in different locations, pretreatment of the image sequence, converted to the Lab color space.
[0064] First, the pre-processed image sequence is converted from the RGB color space to the XYZ space, and then the image sequence of the XYZ space is then converted to the Lab color space.
[0065] S2, extra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More