A task allocation method for multi-UAV cooperative power inspection
A technology for power inspection and task allocation, applied in the fields of genetic laws, mechanical equipment, combustion engines, etc., can solve the problems of chaotic task allocation of drones, random travel paths of work vehicles, and inability to provide theoretical guidance for power inspection work. Achieve the effect of large practical application value, reduce waiting waste, and improve efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
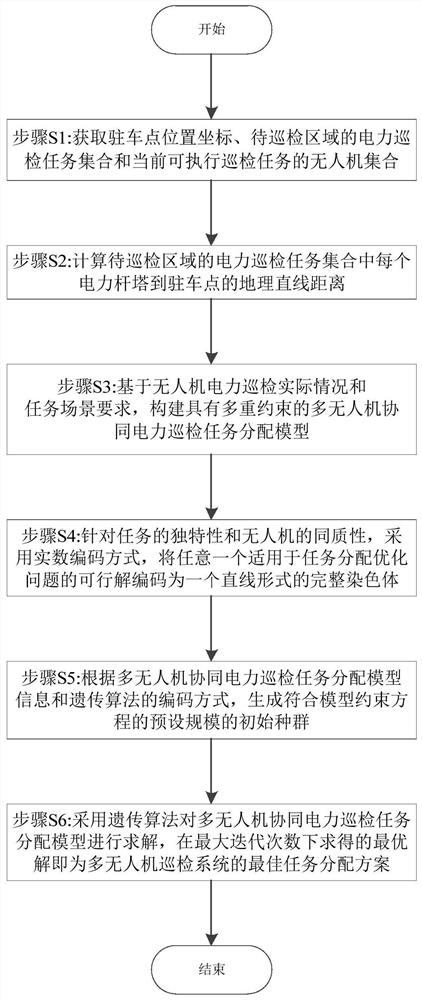
[0067] Further, the geographic straight-line distance is the straight-line distance between two points in a real environment. Calculate each power tower
[0069]d
[0073]
[0078] Minimize: max{Z
[0079]
[0080]
[0081]
[0082]
[0088] Equation (6) is the decision variable constraint.
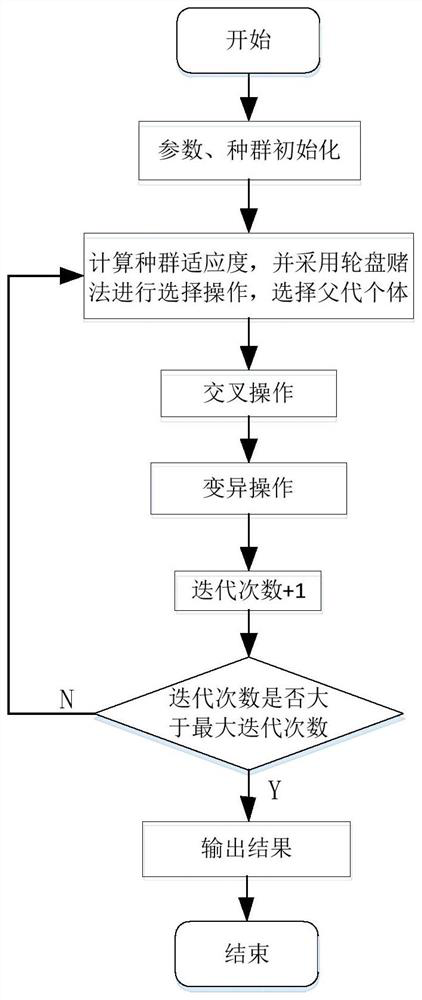
[0094] Selection operation: select individuals in the population to perform crossover and mutation operations through the roulette method. The polymorphism of the present invention
[0095]
[0097] f
[0099]
[0101] Crossover operation: select the individual with the lowest fitness function value in the parent generation through the roulette method, the chromosome of the individual
[0109]
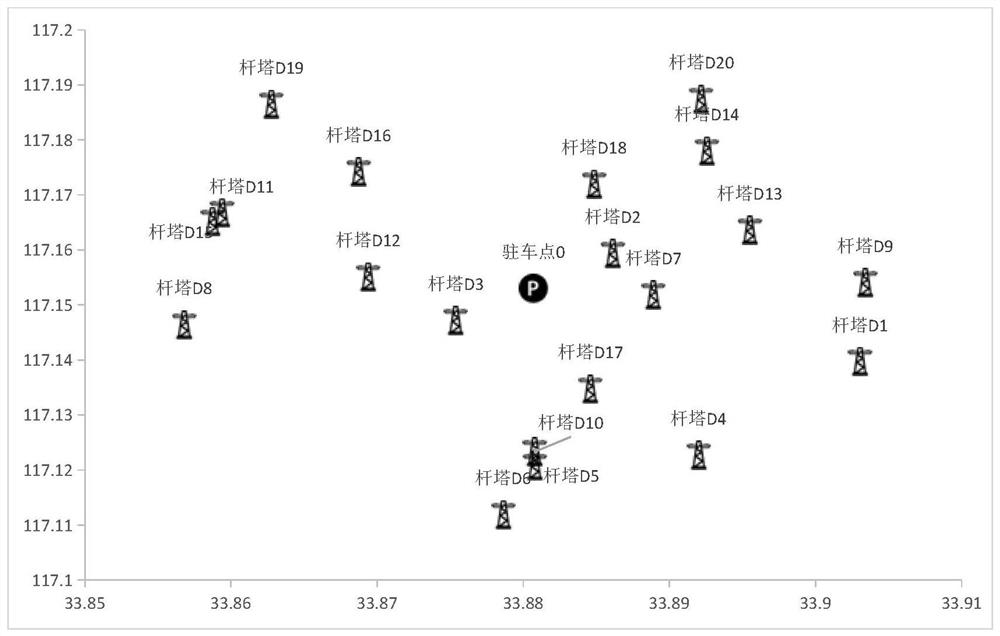
[0111] The longitude and latitude coordinates of the parking point are obtained as (117.1530, 33.8807), and the power inspection task set in the area to be inspected
[0114] Establish a multi-unmanned aerial vehicle cooperative power inspection task assignment model, as shown in the formula (2) to f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com