

Autonomous obstacle avoidance method based on deep learning and stereoscopic vision
A technology of deep learning and obstacle avoidance, applied in neural learning methods, character and pattern recognition, two-dimensional position/channel control, etc., can solve complicated 3D reconstruction and path planning problems, and avoid 3D reconstruction and path planning problems , Improve the effect of accuracy and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
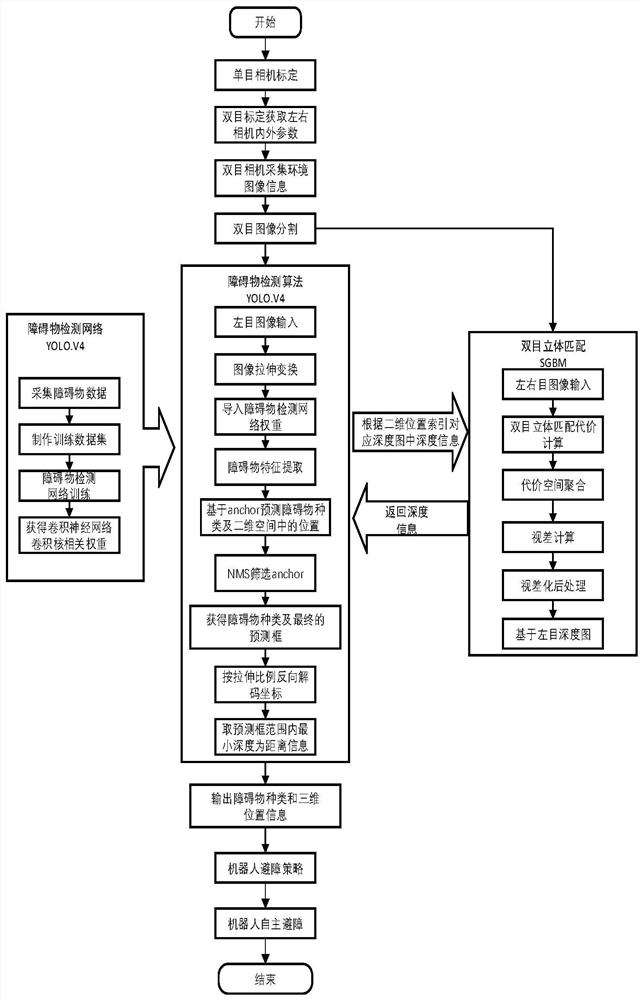
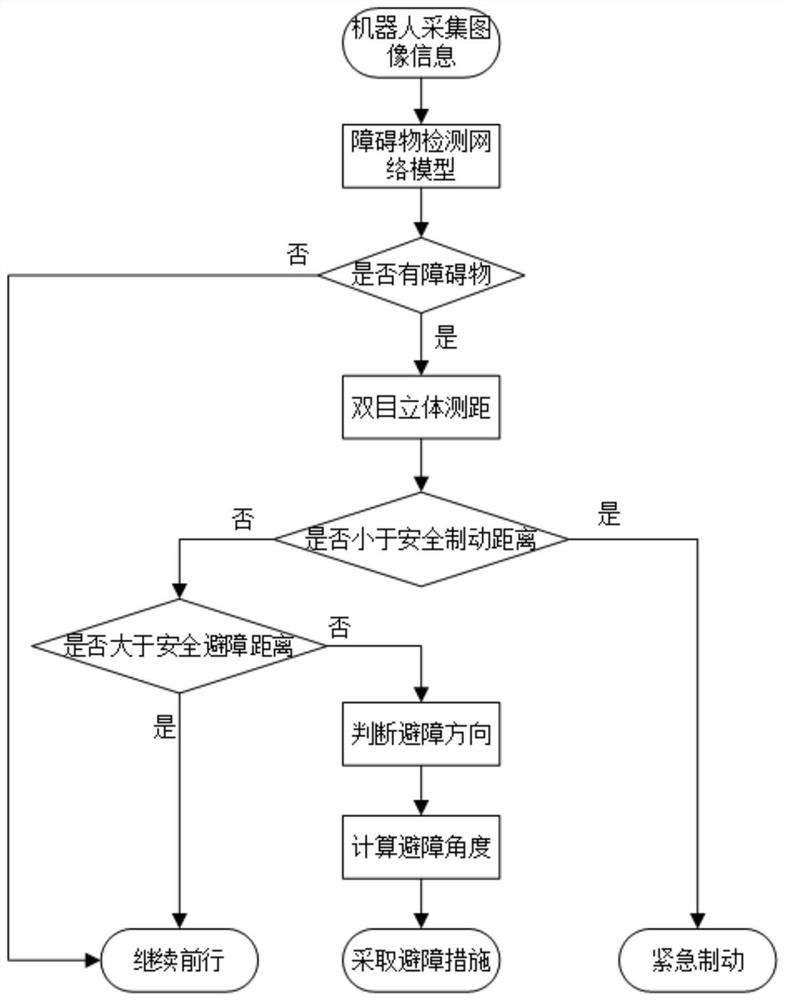
[0027] Step 4. On the basis of the autonomous obstacle avoidance model, the depth information of obstacles is fused to realize obstacle detection in three-dimensional space, obtain the three-dimensional coordinates of obstacles, and solve the problem that a single deep learning algorithm can only obtain two-dimensional coordinate information. , the specific implementation is as follows:
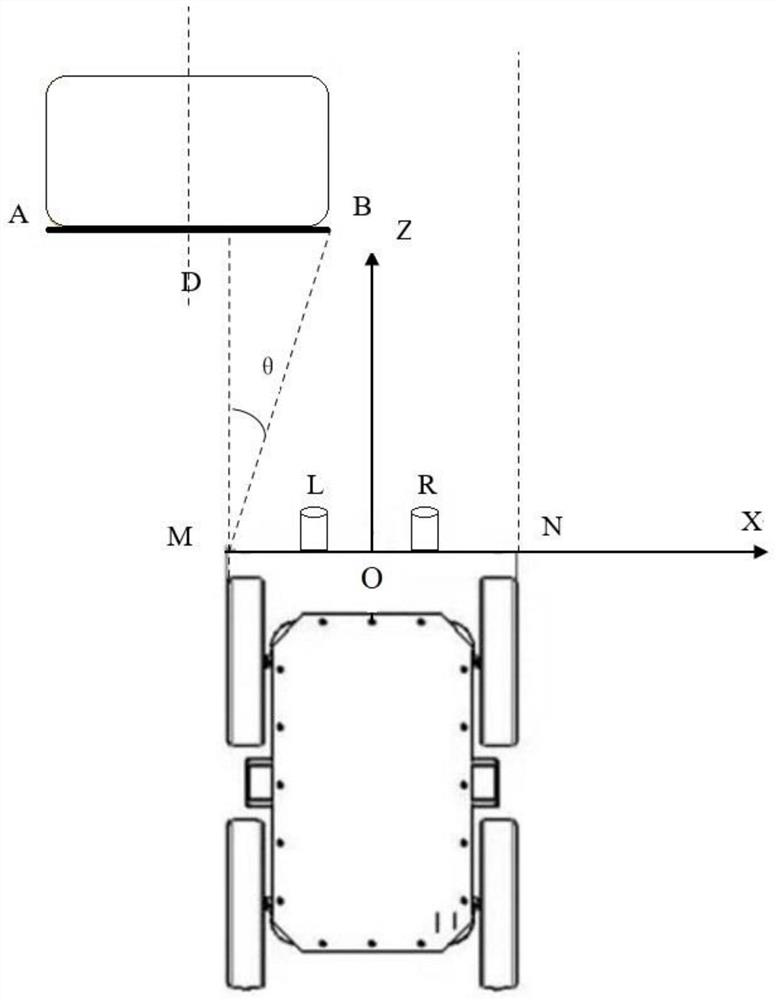
[0028] In order to ensure the one-to-one mapping relationship between the detection image and the depth image of the obstacle avoidance scene in two-dimensional space, coordinate decoding is performed on the detection image to obtain the detection result under the left eye view of the original size, and the coordinate information of the obstacle area is obtained according to the above detection result , obtain the depth information of the obstacle through the coordinate index, and use the minimum depth in the area as the distance between the obstacle and the robot, and then obtain the three-di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More