

Robot teaching reproduction track learning method
A learning method and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increasing the computational burden of the system, and achieve the effect of improving convergence accuracy and convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
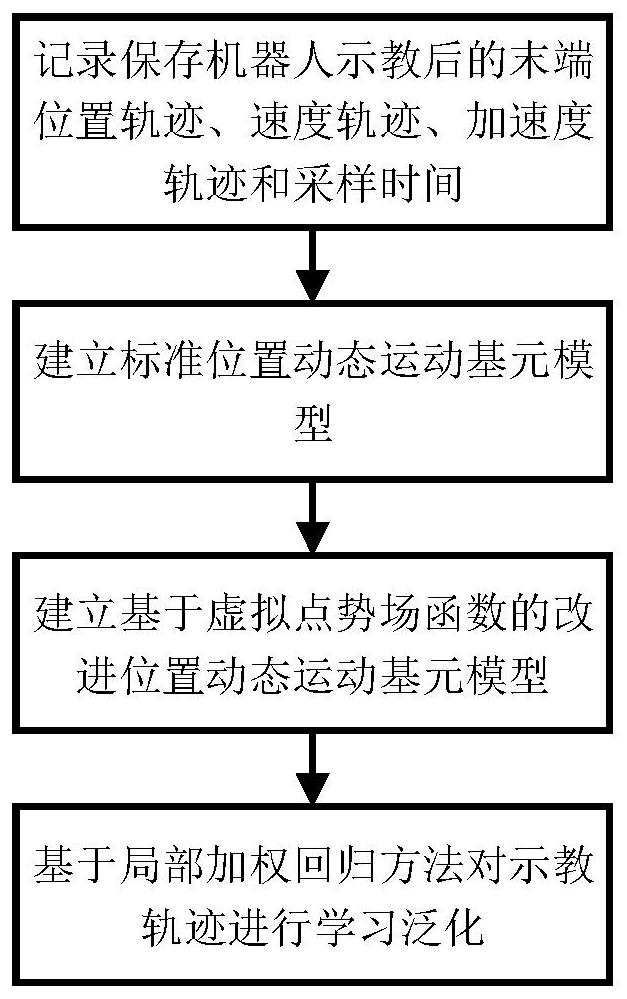
[0071] refer to Figure 1 to Figure 9 , a robot teaching reproduction trajectory learning method, comprising the following steps:
[0072] Step1: Record and save the end position trajectory, velocity trajectory, acceleration trajectory and sampling time after the robot is taught;
[0073] Step2: Establish a standard position dynamic motion primitive model;
[0074] Step3: Establish an improved position dynamic motion primitive model based on the virtual point potential field function;
[0075] Step4: Based on the local weighted regression method, the teaching trajectory is learned and generalized.
[0076] Preferably, in Step1, the teaching trajectory at the end of the robot Collected by the direct teaching system of the robot, and filtered by the system to obtain a continuous and smooth trajectory, which is defined as:
[0077]
[0078] in, Respectively represent the position, velocity and acceleration of the teaching trajectory at the end of the robot; t k is the ...
Embodiment 2
[0125] A robot teaching reproduction trajectory learning method, including: firstly record and save the terminal position trajectory, velocity trajectory, acceleration trajectory and sampling time after the robot teaching; establish a standard position dynamic motion primitive model; establish a virtual point potential field function based The position dynamic motion primitive model is improved; finally, the learning generalization of the teaching trajectory is carried out based on the local weighted regression method.
[0126] 1. Record and save the teaching trajectory at the end of the robot
[0127] Teaching trajectory at the end of the robot It can be collected by the robot’s direct teaching system and filtered by the system to obtain a continuous and smooth trajectory, which is defined as:
[0128]
[0129] in, Respectively represent the position, velocity and acceleration of the teaching trajectory at the end of the robot; t k is the sampling time; k is the sam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More