

A Quadruped Robot Crawling on a Horizontal Grid
A quadruped robot and robot technology, applied in the field of crawling robots, can solve problems such as being unable to walk quickly, and achieve the effects of simple and reasonable structure, increased stability, and improved crawling speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
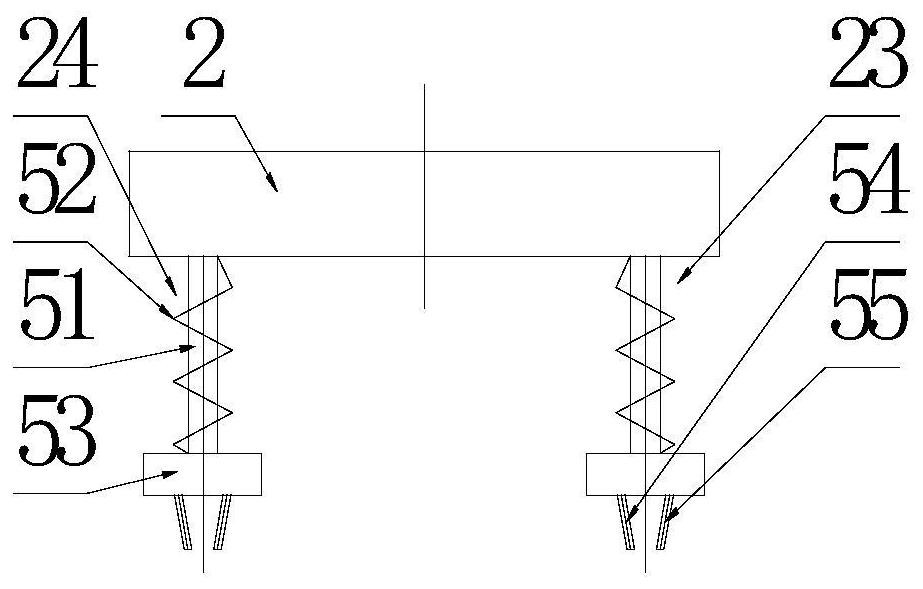
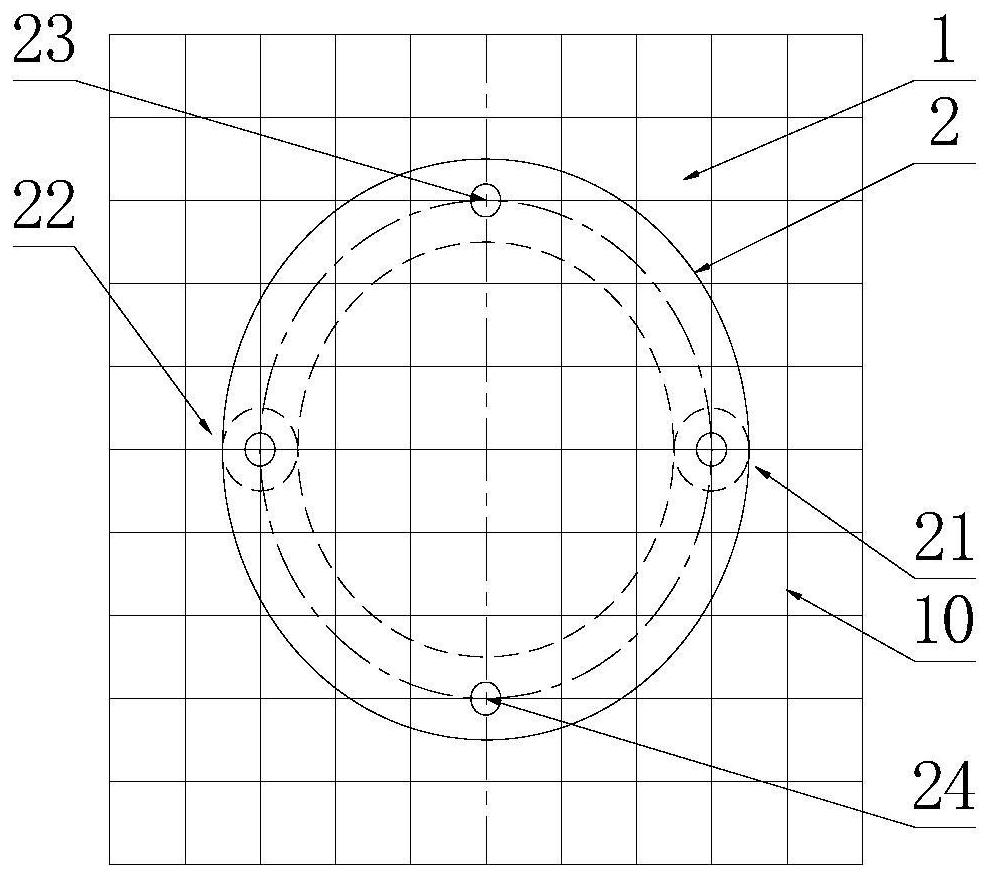
[0017] Such as image 3 As shown, a quadruped robot of the present invention that can crawl on a horizontal grid includes a robot body 2, power legs A21 and balance legs that are arranged on the robot body 2 evenly and sequentially at intervals clockwise along the same circumference. B24, power leg B22 and balance leg A23.
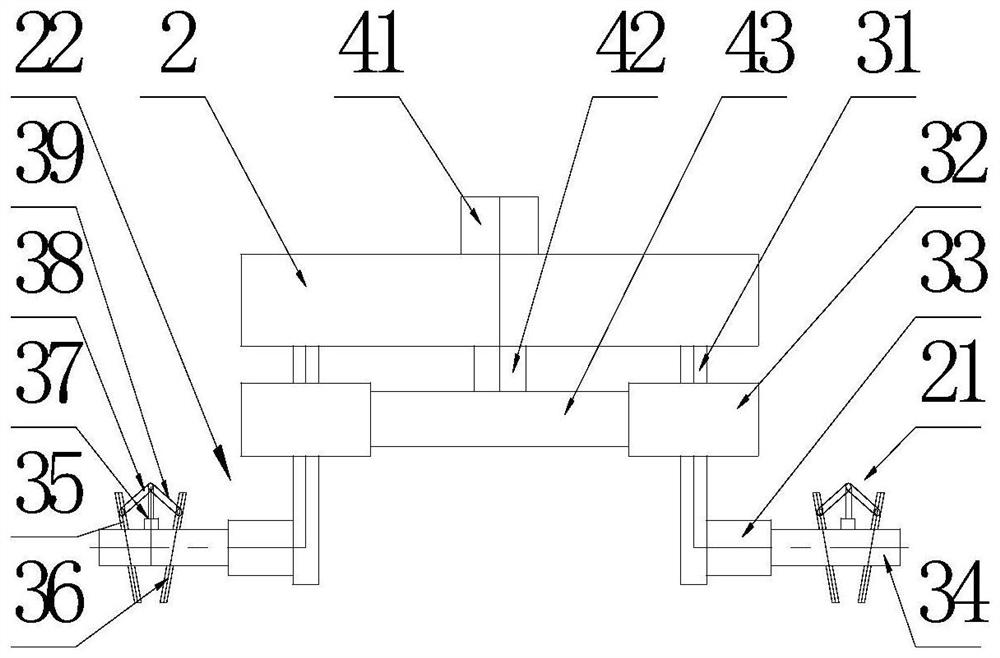
[0018] see figure 1 , the center rotation of robot body 2 is equipped with steering shaft 42, is fixedly equipped with steering gear 43 on the steering shaft 42, is equipped with steering motor 41 on the robot body 2, and the output shaft of steering motor 41 links to each other with the upper end of steering shaft 42.
[0019] Such as image 3 As shown, the power leg A21 has the same structure as the power leg B22 and is symmetrical about the steering axis 42 ; the balance leg A23 has the same structure as the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More