

Wheel-legged type reducing pipeline inner wall crawling robot
A crawling robot and pipeline technology, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems of old-fashioned mechanism, single function, inability to meet the use, etc., and achieve the effect of maintaining stability and flexible turning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0046] First, in this embodiment, the forward direction of this embodiment is taken as the front-rear direction, and the vertical direction is distinguished by the direction of gravity.
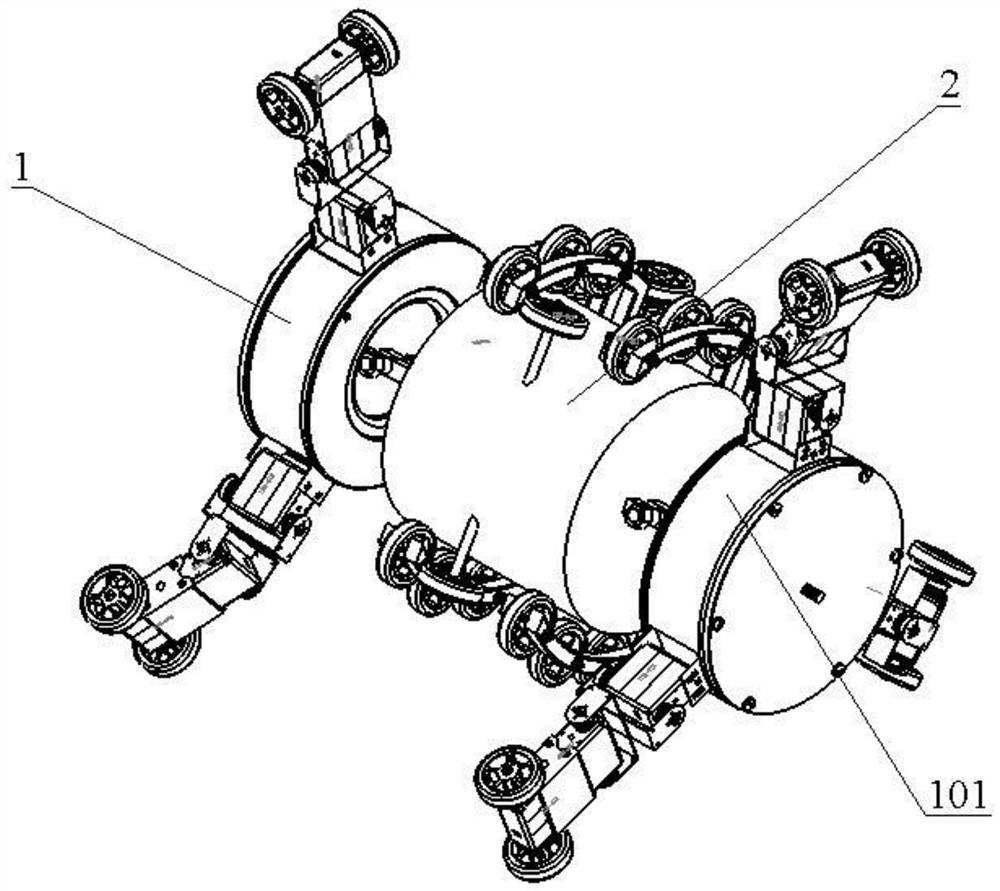
[0047] see figure 1 , the present embodiment provides a wheel-leg crawling robot on the inner wall of a variable-diameter pipeline, including a vehicle body 2 , and a first power body 1 and a second power body 101 arranged on both sides of the vehicle body 2 . The first power body 1 and the second power body 101 are used to provide power and drive the vehicle body 2 to move.
[0048] Specifically, see figure 1 , the first power body 1 is provided with a first connecting rod that is movably connected with it through a stud bolt, and the second power body 101 is provided with a second connecting rod that is movably connected with it through a stud bolt. A connecting rod is connected with the vehicle body 2, and the second power body 101 is connected with the vehicle body 2 through the second ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More