

Robot-assisted hip replacement surgery navigation system
A hip replacement, robot-assisted technology, applied in surgical navigation systems, surgical robots, etc., can solve the problems of increasing the surgeon's surgical workload, increasing the difficulty of the surgeon's operation, and not providing femoral side operation guidance, saving operation time. , the software interface is concise and clear, the effect of a small number of feature points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Below in conjunction with accompanying drawing, the present invention will be further described with regard to specific embodiment:
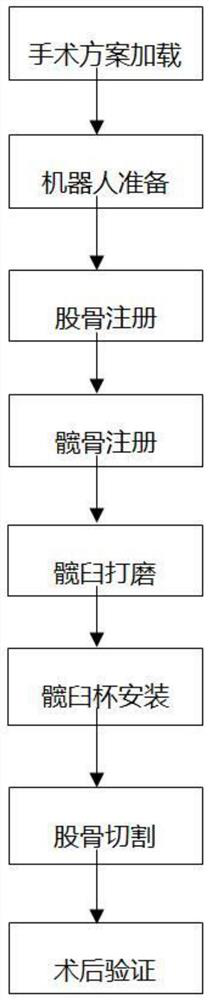
[0023] Such as figure 1 As shown, a robot-assisted navigation system for hip replacement surgery includes 8 modules, which are sequenced as follows according to the operation process,
[0024] The surgical plan loading module is used to support surgical plan management (add / delete), surgical plan preview, and surgical plan fine-tuning. The surgeon can adjust the preoperatively planned anteversion angle, abduction angle and other characteristic values according to the actual situation in the operation. fine-tuning.
[0025] Robot preparation module, the robot preparation module includes equipment connection status monitoring (manipulator and binocular vision camera), installation of end tools, automatic calibration of end tools, installation of connecting rods and trackers, automatic calibration of robotic arms and other robot preparati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More