Two-degrees-of-freedom reinforcement type manipulator
A manipulator and force-increasing technology, applied in the field of robotics, can solve the problems of increased volume and weight of the manipulator, large input voltage or current, etc., and achieve the effect of simple structure, increased degree of freedom, reliable fixation and clamping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0015] The invention provides a two-degree-of-freedom booster manipulator and a control method to realize reliable grasping of board objects.
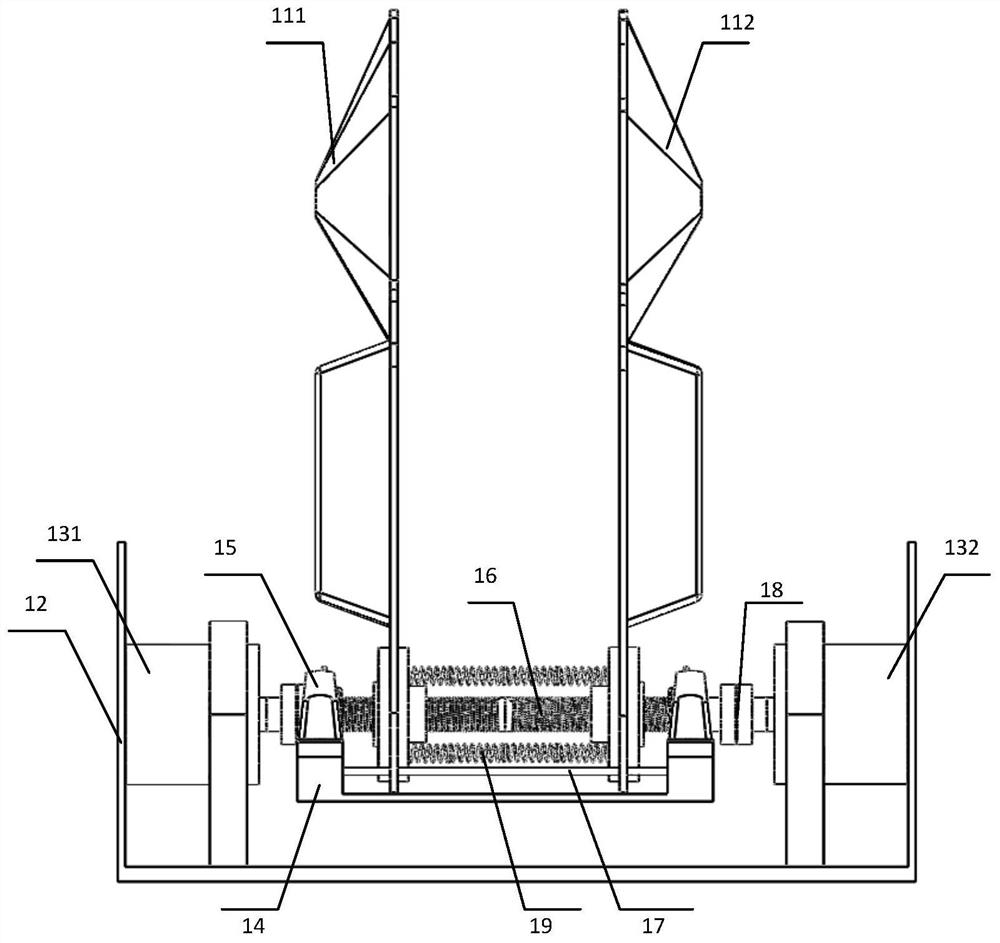
[0016] figure 1 It is a front appearance view of the present invention, including a left side plate 111, a right side plate 112, a housing 12, a left servo motor 131, a right servo motor 132, a base 14, a vertical seat bearing 15, a two-way screw rod 16, and a connecting rod 17 , Coupling 18, spring 19.
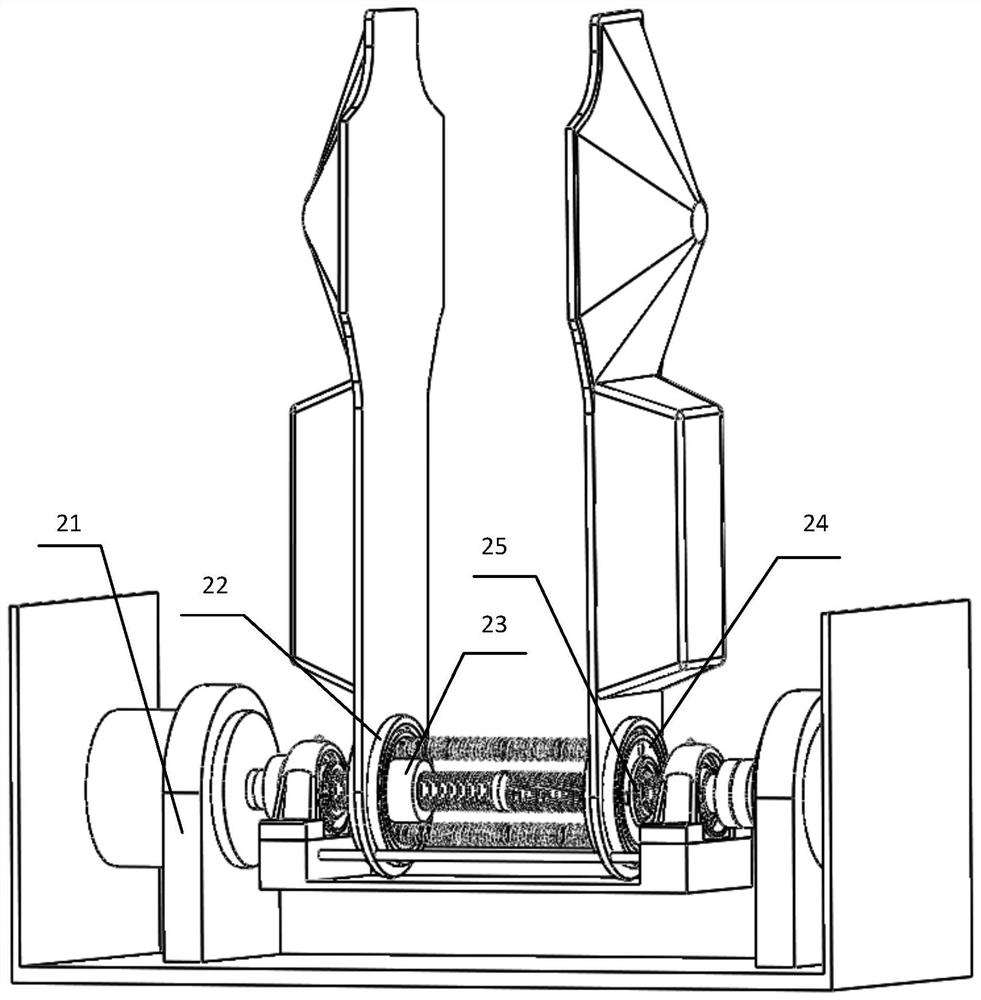
[0017] figure 2 It is the right appearance view of the present invention, including motor bracket 21, circular bearing 22, positive and negative nuts 23, flange 24, and magnetic encoder 25.
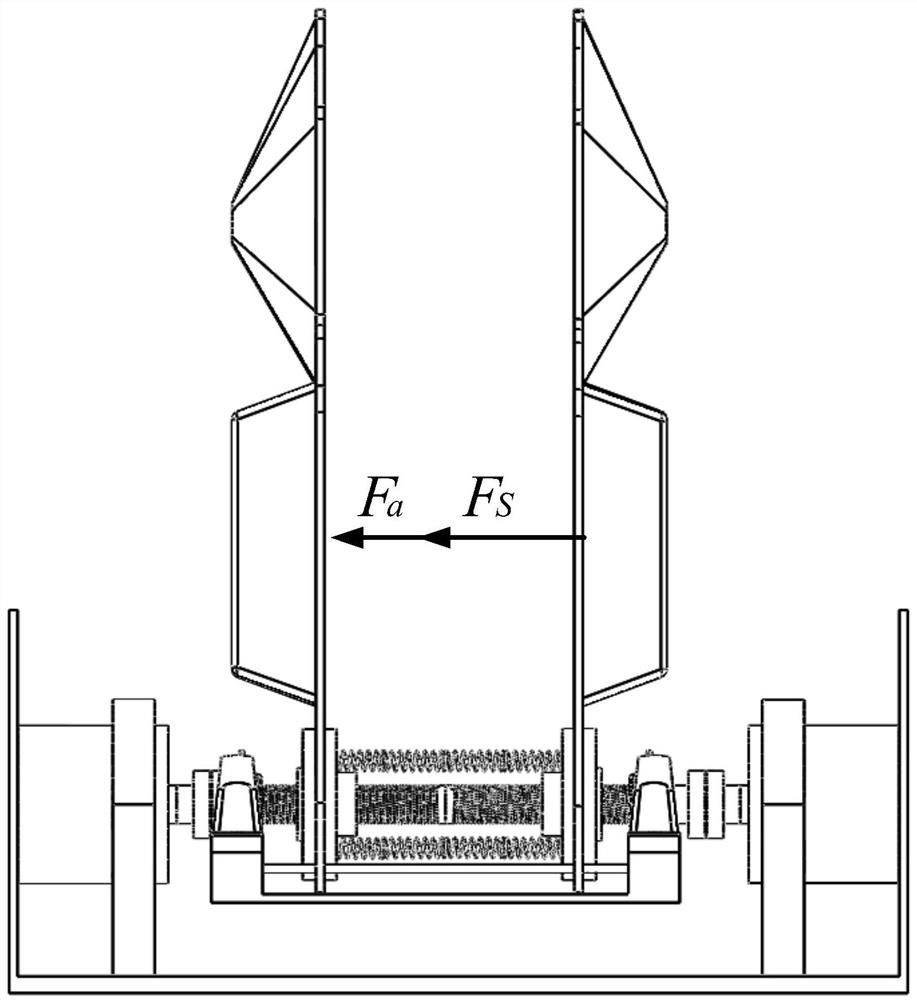
[0018] Working principle: the left servo motor 131 and the right servo motor 132 are fixed on the motor bracket 21 and the casing 12 , and the motor bracket 21 is also fixed on the casing 12 . The left side pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com