

A redundant degree-of-freedom robot for interior surface painting of narrow cavities
An inner surface and degree of freedom technology, applied in the field of robotics, can solve problems such as the inability to realize intelligent spraying of robots, and the lack of good design of the hand joints of spraying robots, so as to achieve the effects of compact structure, stable force transmission, and improved overall rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
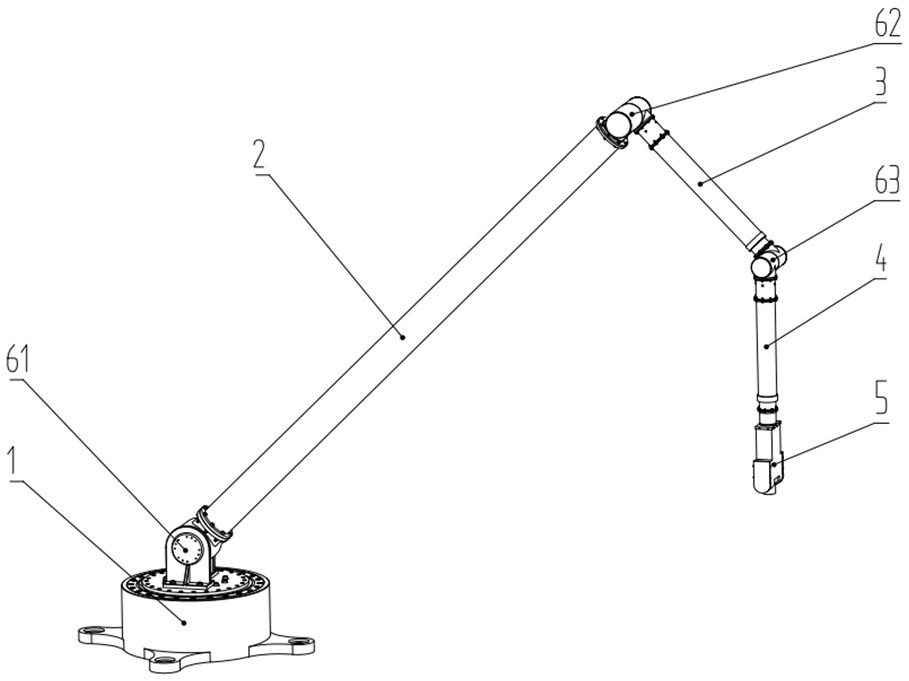
[0041] See figure 1 , a redundant degree-of-freedom robot for coating the inner surface of a narrow cavity,
[0042] It includes a bottom rotating mechanism 1, a connecting rod 2, a first telescopic arm 3, a second telescopic arm 4 and a wrist mechanism 5 connected in sequence;
[0043] The lower end of the connecting rod 2 is set on the bottom rotating mechanism 1 through the first rotary joint 61 to realize multi-degree-of-freedom rotation of the connecting rod 2, and the upper end of the connecting rod 2 is connected with one end of the first telescopic arm 3 through the second rotary joint 62, The rotation of the first telescopic arm 3 is realized, and the other end of the first telescopic arm 3 is connected with one end of the second telescopic arm 4 through the third rotary joint 63 to realize the rotation of the second telescopic arm 4;
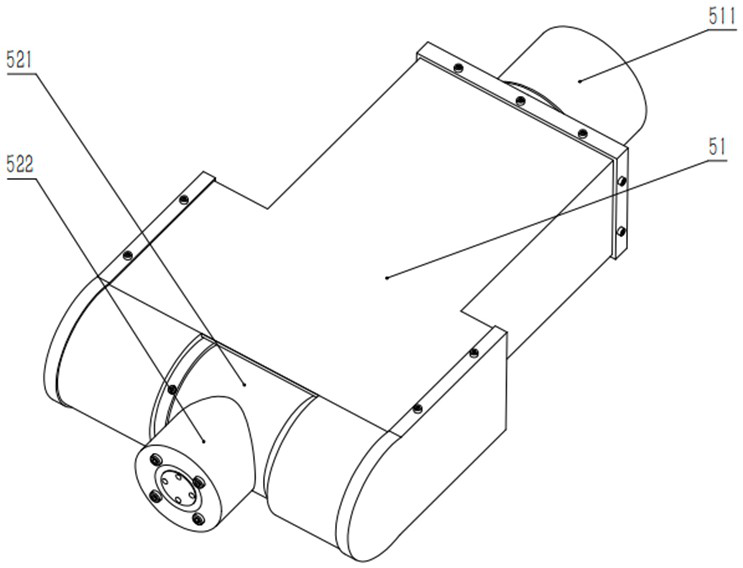
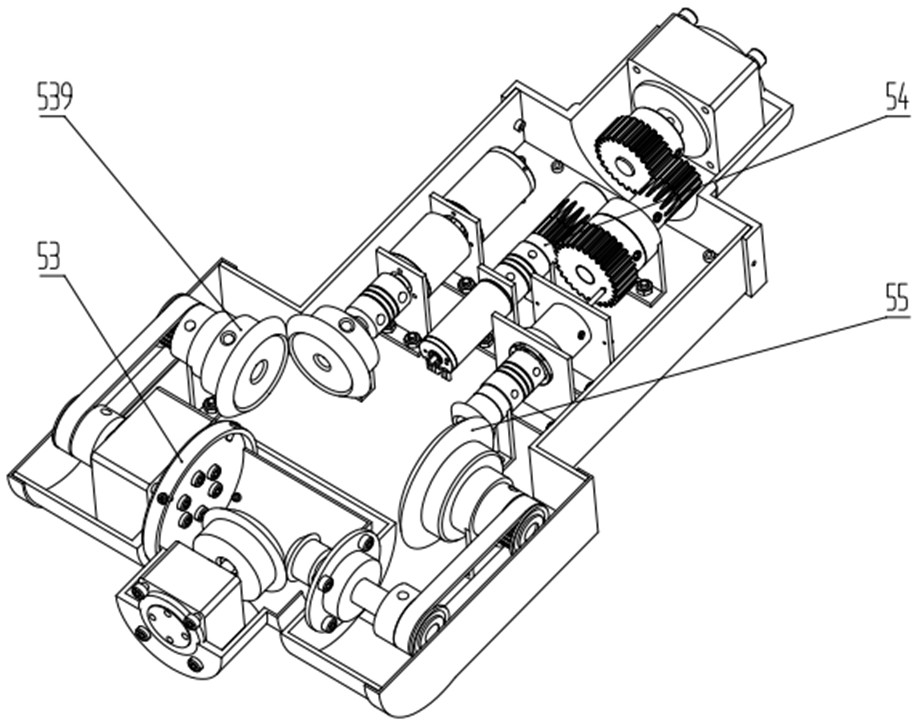
[0044] See image 3 , the wrist mechanism 5 includes a case and a finger-turning mechanism 55, a hand-swing mechanism 53 and a wris...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More