

A small fault detection method for a closed-loop control system of a sampling manipulator
A fault detection and closed-loop control technology, applied in general control systems, control/regulation systems, testing/monitoring control systems, etc., can solve problems such as difficulty in detecting small faults, frequent changes in fault diagnosis speed, etc., and achieve the release of symbol constraints. , the effect of increasing the detectable fault information and improving the rapidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
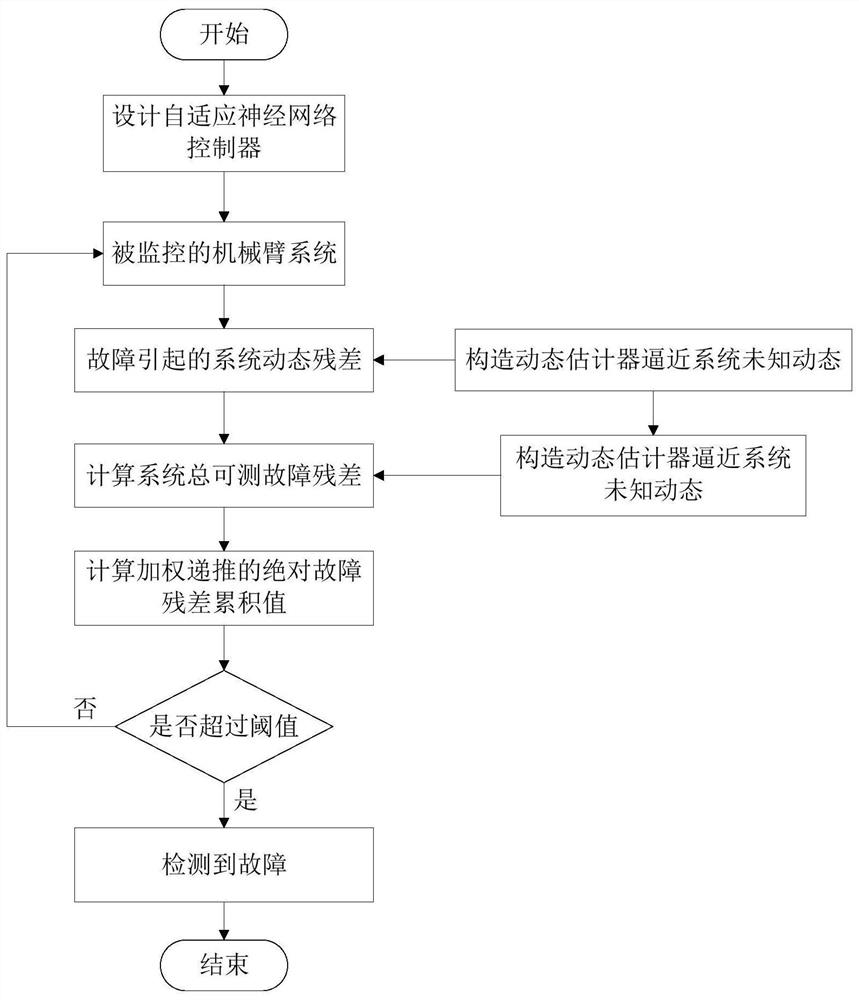
[0088] Such as figure 1 As shown, the present embodiment provides a small fault detection method of the closed-loop control system of the sampling manipulator, comprising the following steps:
[0089] S1: Establish a discrete-time single-link rigid manipulator dynamics model based on sampling data, specifically expressed as:
[0090]
[0091] Among them, k represents the running time of the sampling discrete manipulator system, T s Indicates the sampling time interval, and the sampling time point is kT s , X(k)=[x 1 (k),x 2 (k)] T ; x 1 (k) and x 2 (k) are the joint angular displacement and joint angular velocity of the manipulator respectively. u(k) is the control torque, f 0 (X(k)) and g 0 (X(k)) is the unknown nonlinear function of the system, g 0 (X(k))=T s M(x 1 (k)) -1 , f 0 (X(k))=x 2 (k)+T s M(x 1 (k)) -1 [-V m (x 1 (k),x 2 (k))x 2 (k)-G(x 1 (k))], M(x 1 (k)) is the inertia matrix of the manipulator, V m (x 1 (k),x 2 (k)) is the centripetal...
Embodiment 2
[0134] A small fault detection system for a closed-loop control system of a sampling manipulator, including: a model building block, an adaptive neural network controller building block, a dynamic estimator building block, a total measurable fault residual calculation module, and an absolute fault residual cumulative value Calculation module, fault detection decision building block;
[0135] In this embodiment, the model building module is used to establish a data sampling-based mechanical arm dynamics model and an expected regression trajectory model;
[0136] In this embodiment, the adaptive neural network controller building block is used to construct an adaptive neural network controller;
[0137] In this embodiment, the dynamic estimator building block is used to construct a dynamic estimator to approximate the unknown dynamics of the system;
[0138] In this embodiment, the total measurable fault residual calculation module is used to calculate the total measurable faul...
Embodiment 3
[0152] This embodiment provides a storage medium, the storage medium may be a storage medium such as ROM, RAM, magnetic disk, optical disk, etc., and the storage medium stores one or more programs. A glitch detection method for a closed-loop control system of a robotic arm.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More