

Embedded system simulation method and system for multi-robot manufacturing system
An embedded system and manufacturing system technology, applied in design optimization/simulation, constraint-based CAD, comprehensive factory control, etc., can solve problems affecting PRES+net application, PRES+net state space explosion, etc., to alleviate the state space explosion problem , the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] The purpose of this embodiment is to provide an embedded system simulation method for a multi-robot manufacturing system.
[0040] An embedded system simulation method for a multi-robot manufacturing system, wherein the manufacturing system includes a processing control system and an assembly control system sharing several robot control subsystems, including:
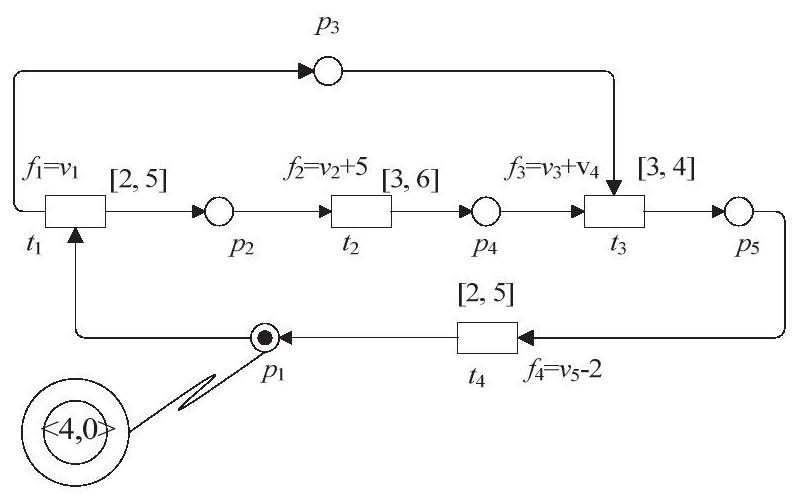
[0041] Based on the function and module division of the processing and assembly system in the manufacturing system, the PRES+net model of the processing control system and the PRES+net model of the assembly control system are respectively constructed;
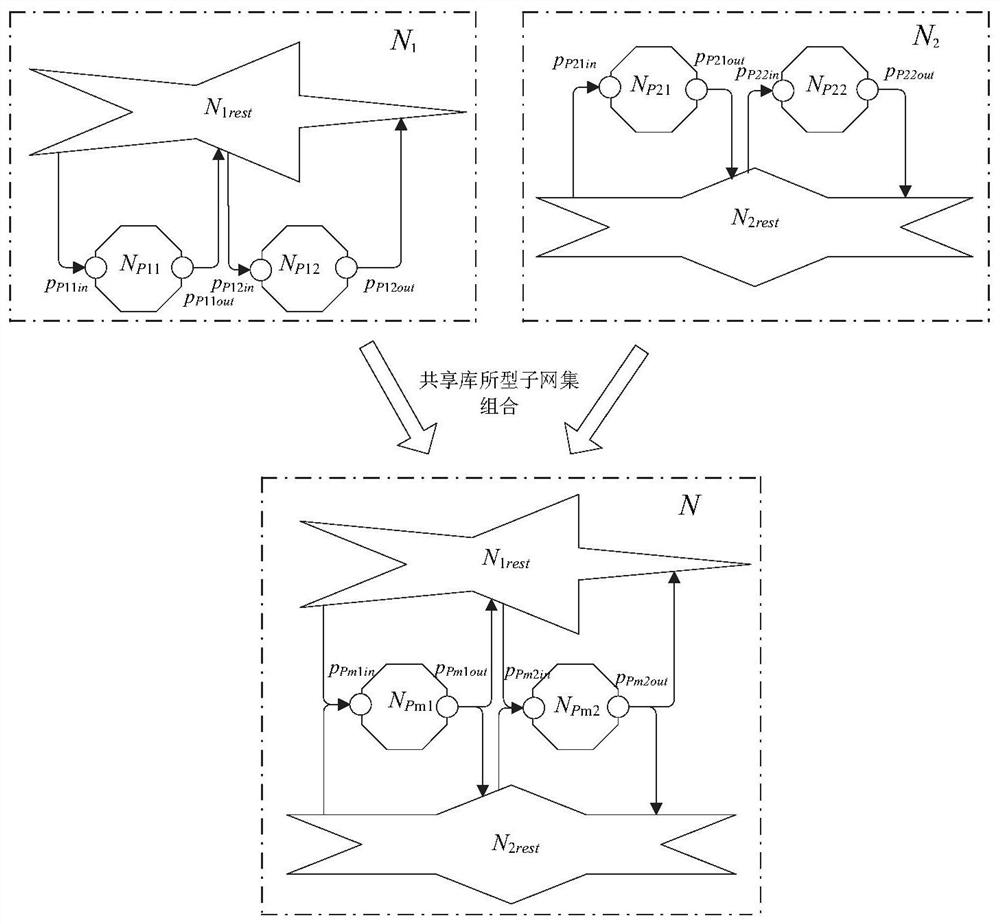
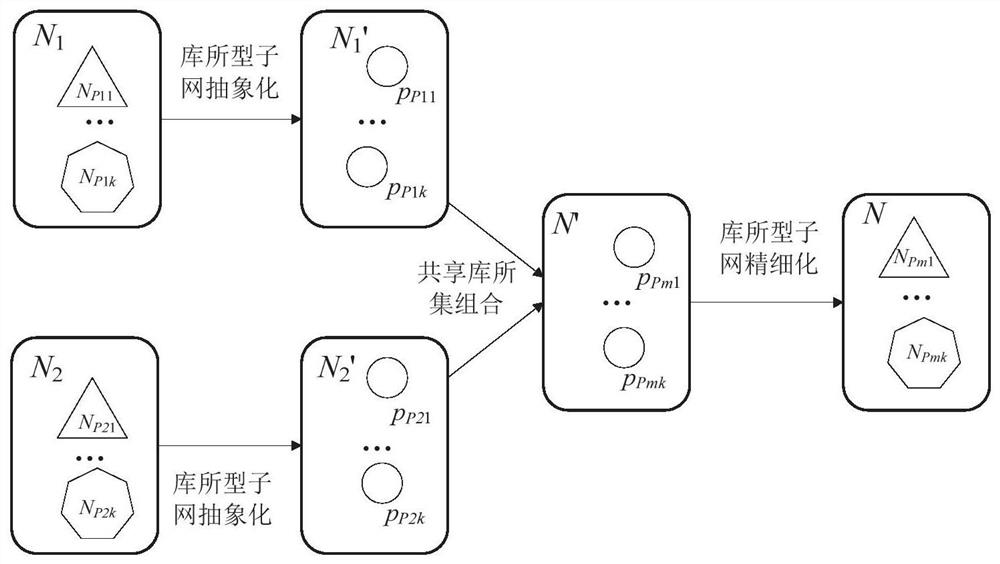
[0042] Based on the combination method of the shared place-type subnetwork set, the shared operation of the place-type subnetwork set is performed on the PRES+net model of the processing control system and the PRES+network model of the assembly control system, and the combined PRES+network model of the shared place-set set is obtained;
[0043] The embedded system...
Embodiment 2
[0246] The purpose of this embodiment is to provide an embedded system simulation system for a multi-robot manufacturing system.
[0247] An embedded system simulation system for a multi-robot manufacturing system, wherein the manufacturing system includes a processing control system and an assembly control system sharing several robot control subsystems, including:
[0248] A basic model construction unit, which is used to respectively construct a processing control system PRES+network model and an assembly control system PRES+network model based on the functions and module divisions of the processing and assembly systems in the manufacturing system;
[0249] A place-type subnet sharing unit, which is used to share the place-type subnetwork set based on the combination method of the shared place-type subnetwork set for the processing control system PRES+net model and the assembly control system PRES+net model, to obtain a shared place Set combined PRES+net model;
[0250] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More