

Embedded system simulation method and system for multi-robot manufacturing system
A technology of embedded systems and manufacturing systems, applied in design optimization/simulation, constraint-based CAD, comprehensive factory control, etc., can solve the problems of PRES+ network state space explosion, affecting PRES+ network applications, etc., to alleviate the state space explosion problem , the effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] The purpose of this embodiment is to provide an embedded system simulation method for a multi-robot manufacturing system.
[0040] An embedded system simulation method for a multi-robot manufacturing system, wherein the manufacturing system includes a processing control system and an assembly control system sharing several robot control subsystems, including:
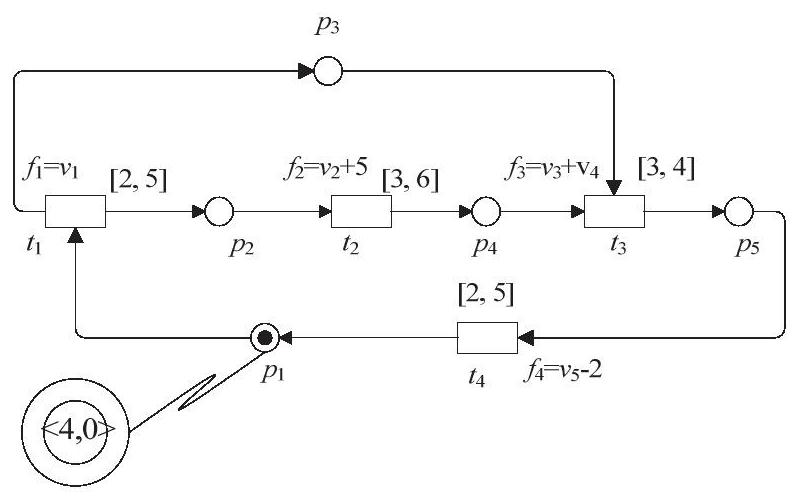
[0041] Based on the function and module division of the machining and assembly systems in the manufacturing system, the PRES+ net model of the machining control system and the PRES+ net model of the assembly control system are constructed respectively;
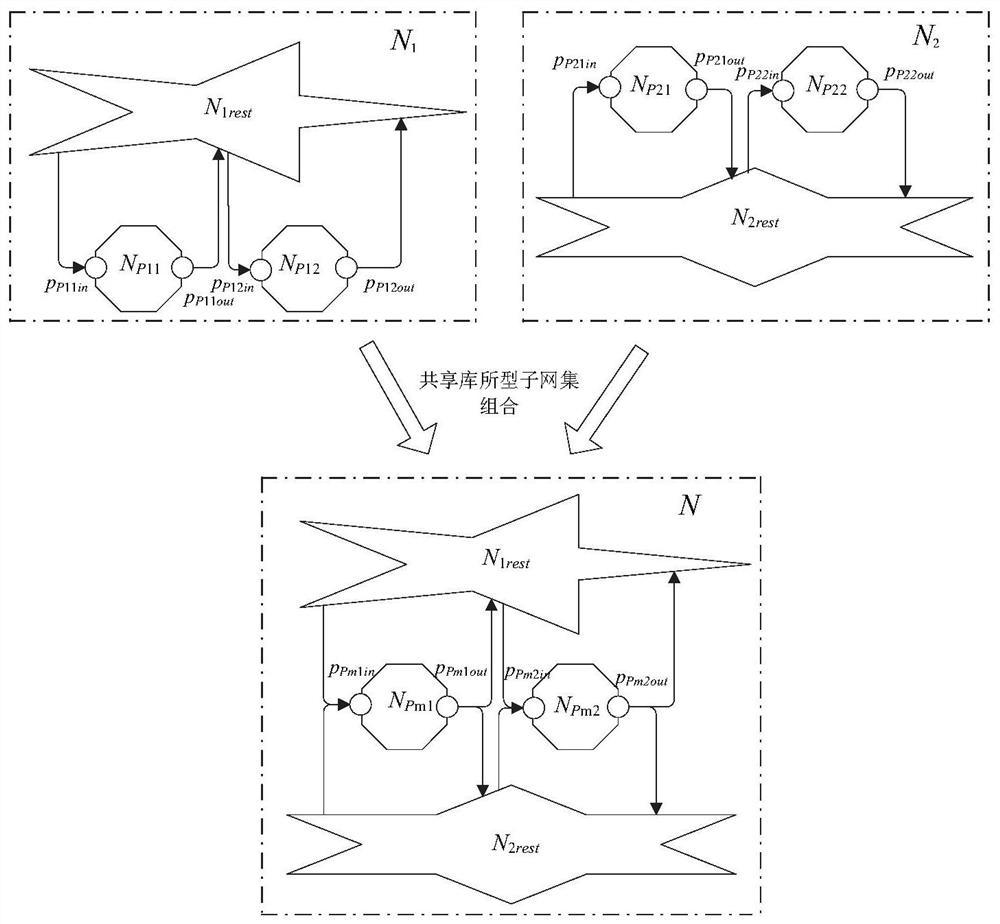
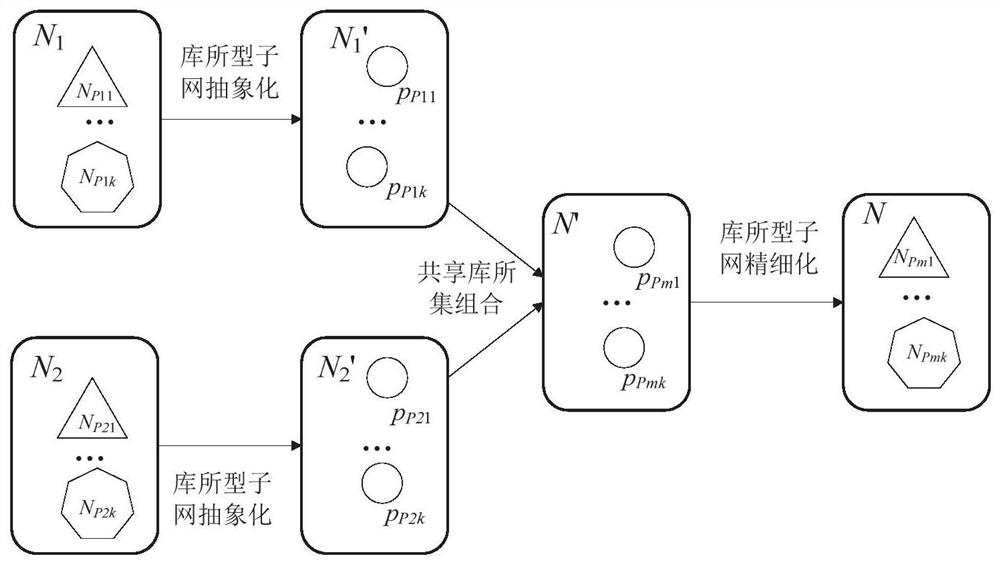
[0042] Based on the combination method of the shared place type subnet set, the shared operation of the place type subnet set is performed on the PRES+net model of the machining control system and the PRES+net model of the assembly control system, and the PRES+net model of the shared place set combination is obtained;
[0043] Based on the combined PRES+net model...
Embodiment 2
[0246] The purpose of this embodiment is to provide an embedded system simulation system for a multi-robot manufacturing system.
[0247] An embedded system simulation system for a multi-robot manufacturing system, wherein the manufacturing system includes a processing control system and an assembly control system sharing several robot control subsystems, including:
[0248] The basic model construction unit is used to construct the processing control system PRES+net model and the assembly control system PRES+net model respectively based on the function and module division of the processing and assembly systems in the manufacturing system;
[0249] The place type subnet sharing unit is used to share the place type subnet set based on the shared place type subnet set combination method on the machining control system PRES+net model and the assembly control system PRES+net model, and obtain the shared place type subnet set. Set combined PRES+net model;
[0250] The simulation u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More