

Mechanical arm
A technology of manipulators and tracks, applied in the field of manipulators, can solve the problems of manipulator loss, loss of manipulator precision function, affecting stop performance, etc., to achieve the effect of improving accuracy, ensuring accuracy and reducing wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
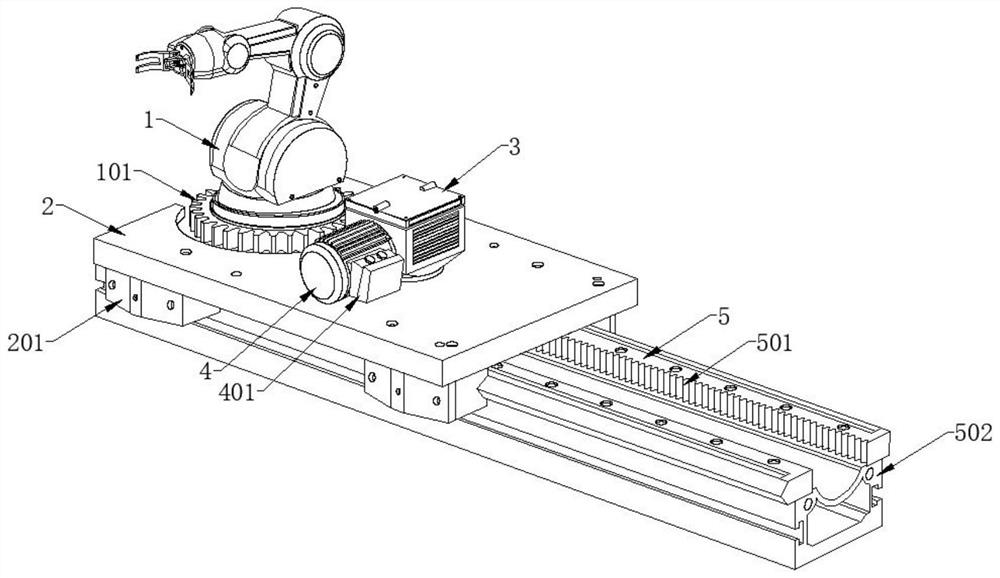
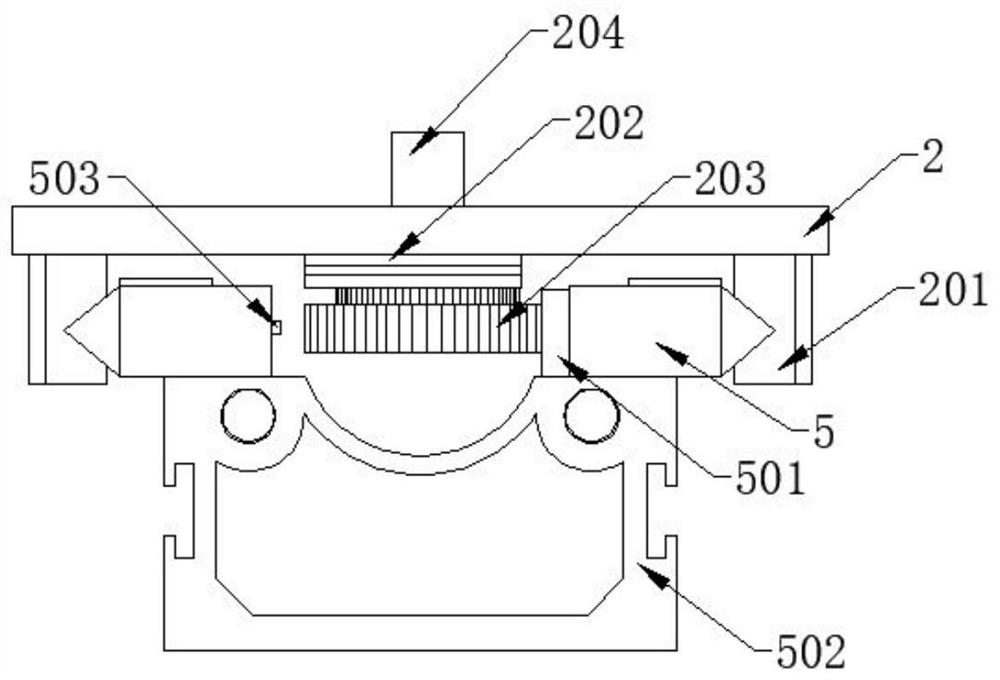
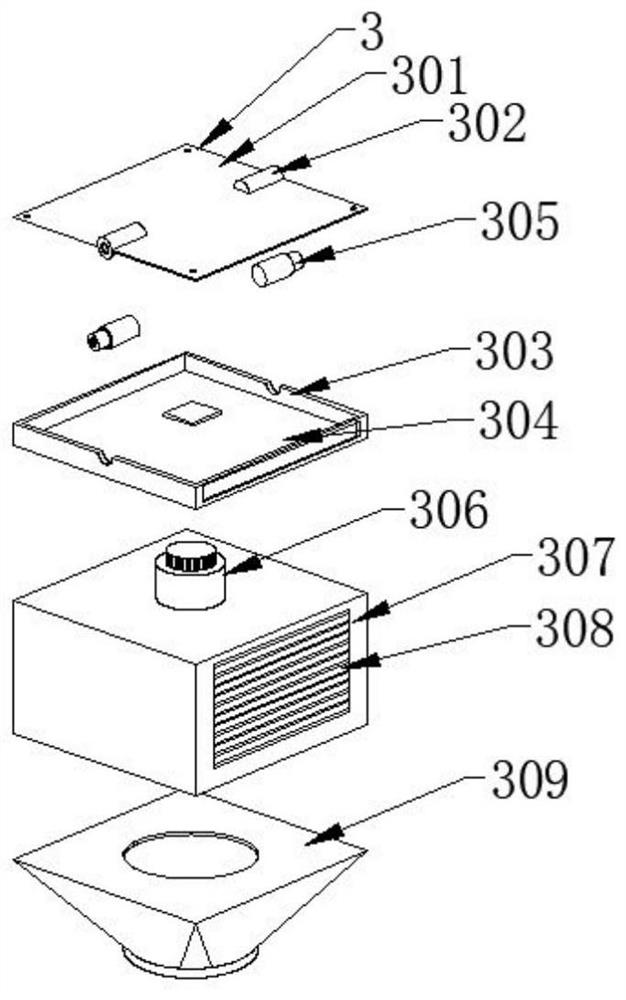
[0028] Such as Figure 1-5 As shown, the present invention provides a kind of manipulator, comprises manipulator 1, rail base 502 and cogged groove track 5, and the bottom end of manipulator 1 is equipped with toothed plate 101, and the bottom end of toothed plate 101 is equipped with placing platform 2, and the bottom of placing platform 2 A control module 3 is installed in the middle of the surface, a driving motor 4 is installed at one end of the control module 3, a mechanical control switch 401 is installed at one end of the driving motor 4, a sliding block 201 is installed on both sides of the bottom end of the placing platform 2, and the inner side of the sliding block 201 A cogged track 5 is installed, a notch 501 is arranged on one side of the cogged track 5, a track base 502 is installed at the bottom of the cogged track 5, a cover plate 301 is installed on the top of the control module 3, and the surface of the cover plate 301 Both ends are provided with a protective...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More