

Method for determining oral sampling position, sampling robot and computer storage medium
A robot and oral technology, applied in computing, instruments, image data processing and other directions, can solve the problems of simple structure, inconspicuous boundaries, and inability to identify the specific location of the tonsils, so as to ensure accuracy, improve safety and reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
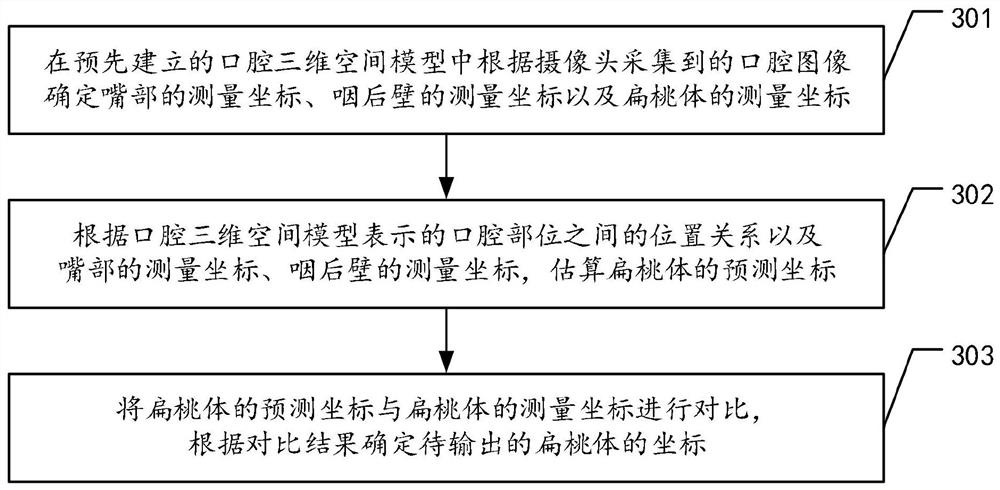
[0030] The embodiment of the present application provides a method for determining a sampling site in the oral cavity, a sampling robot and a computer storage medium, which are used to more accurately determine the specific position of the sampling site in the oral cavity.
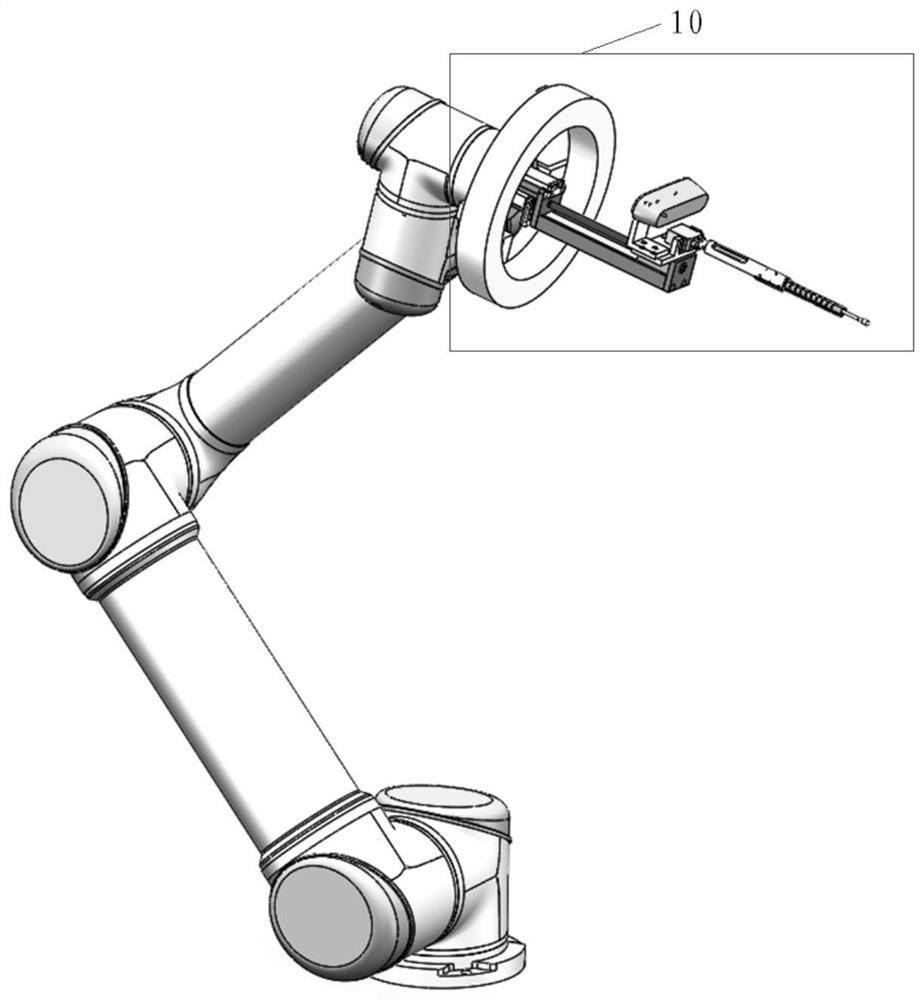
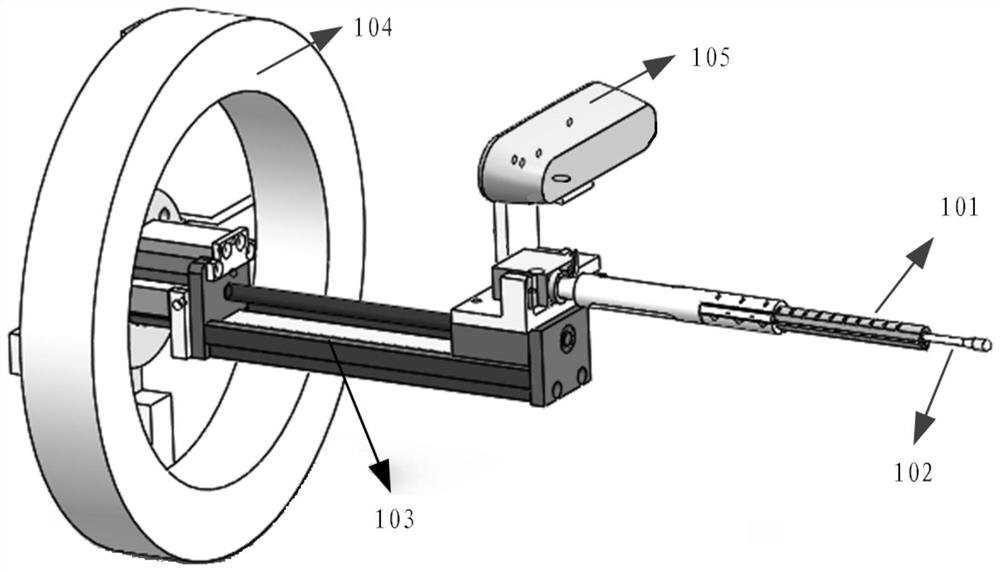
[0031] see figure 1 and figure 2 ,in figure 2 for figure 1 The partial enlarged schematic diagram of the component 10 in the structure of the sampling robot is shown, and the structure of the sampling robot in the embodiment of the present application includes:
[0032] In the embodiment of the present application, the sampling robot can be used to automatically sample the sampling site of the target object, for example, to sample the tonsil during the oral sampling process of the throat swab, and the tonsil can be the left tonsil and / or the right tonsil. Wherein, the composition of the assembly 10 includes a sampling part 101, a clamping device 103, etc., the clamping device 103 is used to clamp the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More