

Surgical robot constrained motion control method based on spinor theory
A surgical robot, a technology for restraining motion, applied in the field of motion control of surgical robots, can solve problems such as large amount of calculation and long calculation time, and achieve the effects of improving response speed, reducing damage, and simplifying the control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be understood that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concept of the present invention.
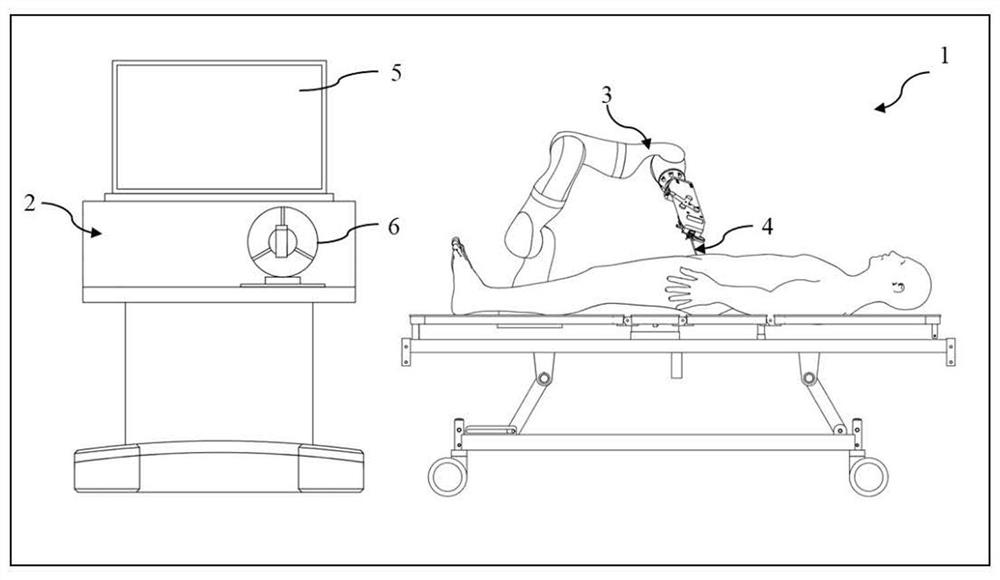
[0028] like figure 1 As shown, the robotic surgery system 1 provided by the embodiment of the present invention includes: a main console 2; a surgical robot 3; a surgical tool 4; the main console 2 includes: a display device 5 for displaying images in the patient's body and operating images; The machine interaction device 6 can output the operation of the surgeon to the surgical robot by means of the man-machine interaction devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More