

Robot Path Planning Method Based on Adaptive Neighborhood and Steering Cost
An adaptive neighborhood and path planning technology, applied in the field of physics, can solve the problems affecting the operation efficiency of the robot, redundant points in the planned path, and the path is not smooth, so as to reduce the steering cost and travel time, improve the operation efficiency, improve the The effect of path smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail with reference to the accompanying drawings.
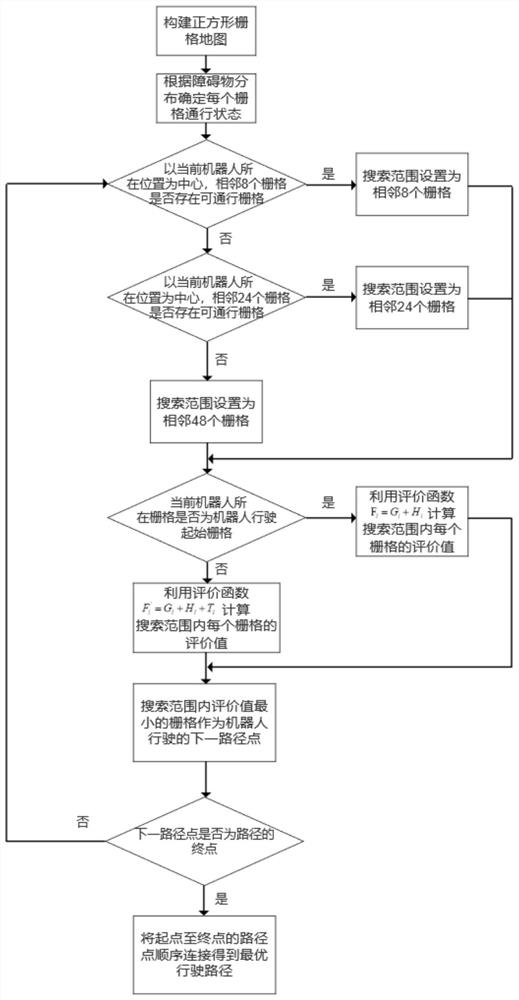
[0031] Reference attachment Figure 1 The implementation steps of the present invention will be further described in detail.
[0032] Step 1: Build a square grid map.
[0033] Construct a square grid map according to the way the robot is going to travel, and the side length of each square grid is equal to the distance between the left and right wheels of the robot.
[0034] 2, judging each grid with obstacles in the grid map as an impassable grid; Each grid without obstacles is judged as a passable grid.
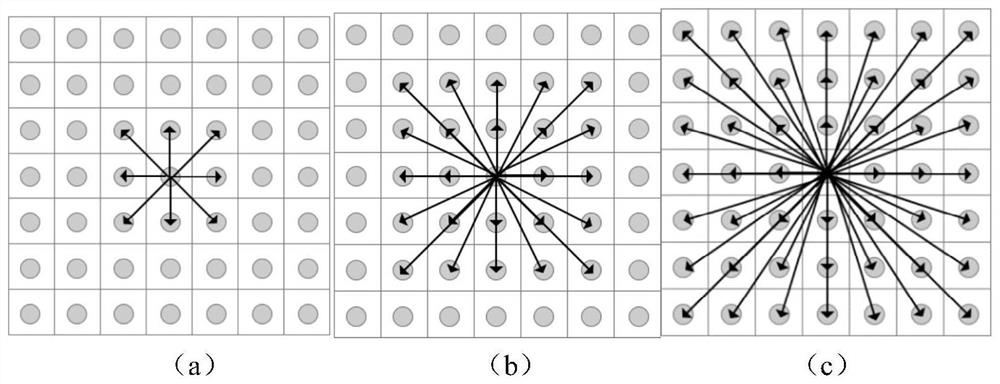
[0035] Reference attachment Figure 2 , the implementation steps of determining the search range of the present invention will be further described in detail.
[0036] Figure 2 The black dot where the starting point of the arrow in is located is the current path point of the robot, and the black dot pointed by each arrow is the search neighborhood determined in this ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More