

A Vehicle Path Planning Method Based on Improved Bidirectional Informed-rrt*
A path and vehicle technology, applied in vehicle position/route/altitude control, motor vehicle, two-dimensional position/navigation control and other directions, can solve the problem that the vehicle cannot reach the target point, cannot meet the vehicle driving requirements, waste search time, etc. problem, to achieve the effect of high path planning efficiency, reducing time consumption and reducing randomness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
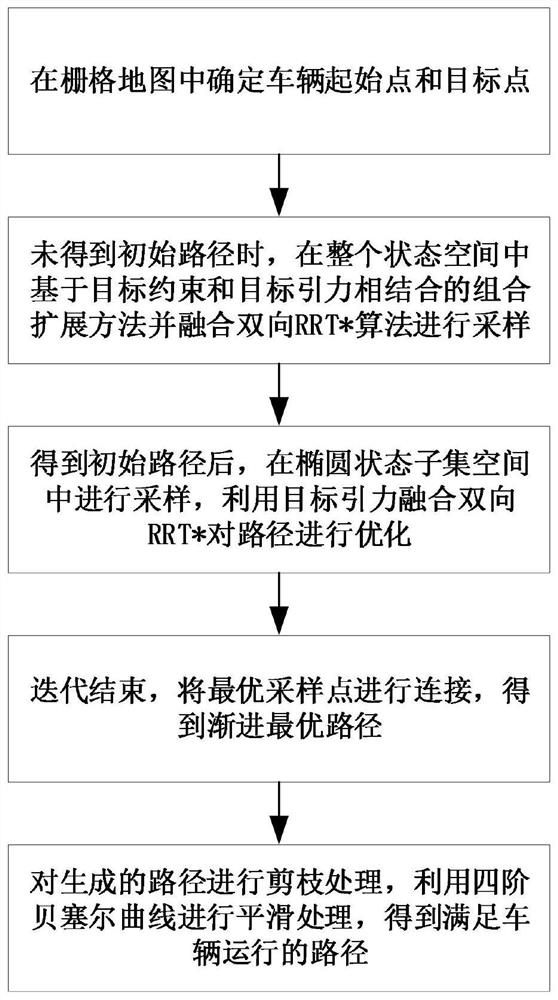
[0061] In this embodiment, as figure 1 As shown, a vehicle path planning method based on improved bidirectional informed-RRT* includes the following steps:
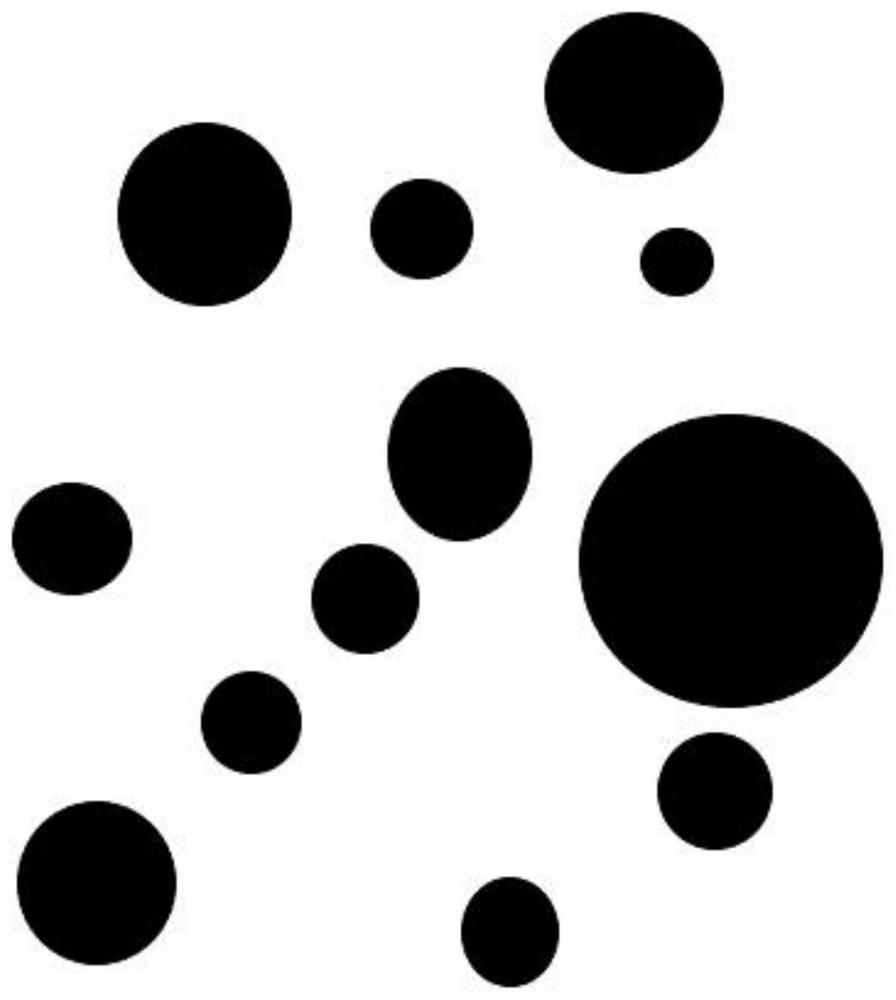
[0062] Step 1. Use the lidar sensor or depth camera sensor that comes with the vehicle to collect environmental information around the vehicle, and use it to build a grid map, mark each grid in the grid map as an obstacle space or free space, and after marking Select a starting point x in the raster map of start and the target point x goal ; image 3 and Figure 4 , the black part is the obstacle space, and the white part is the free space;
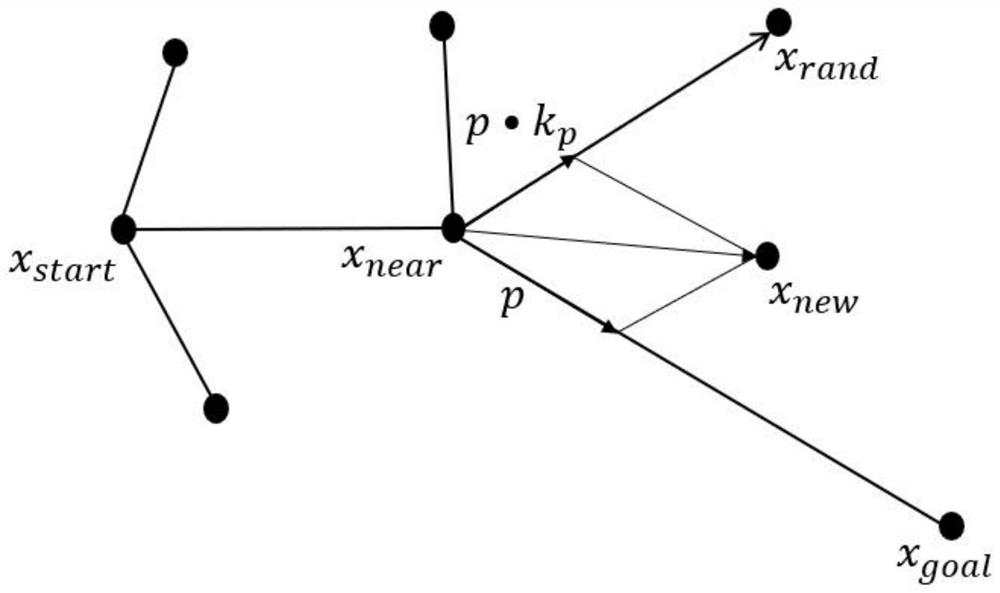
[0063] Step 2. Adopt a combined expansion strategy combining target constraints and target gravity and integrate the traditional two-way RRT* algorithm to sample in the free space of the grid map to obtain the initial path;
[0064] Step 2.1. Define two fast-exploring random trees Ta and Tb;
[0065] Step 2.2. Obtain a new node x of the fast-exploring random tree Ta new_a , to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More