

Hand-eye calibration method based on deep learning
A hand-eye calibration and deep learning technology, which is applied in the field of hand-eye calibration based on deep learning, can solve the problems that the corner points cannot obtain the position information of the calibration object, consumes a long time, and requires a large amount of calculation. Robust effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
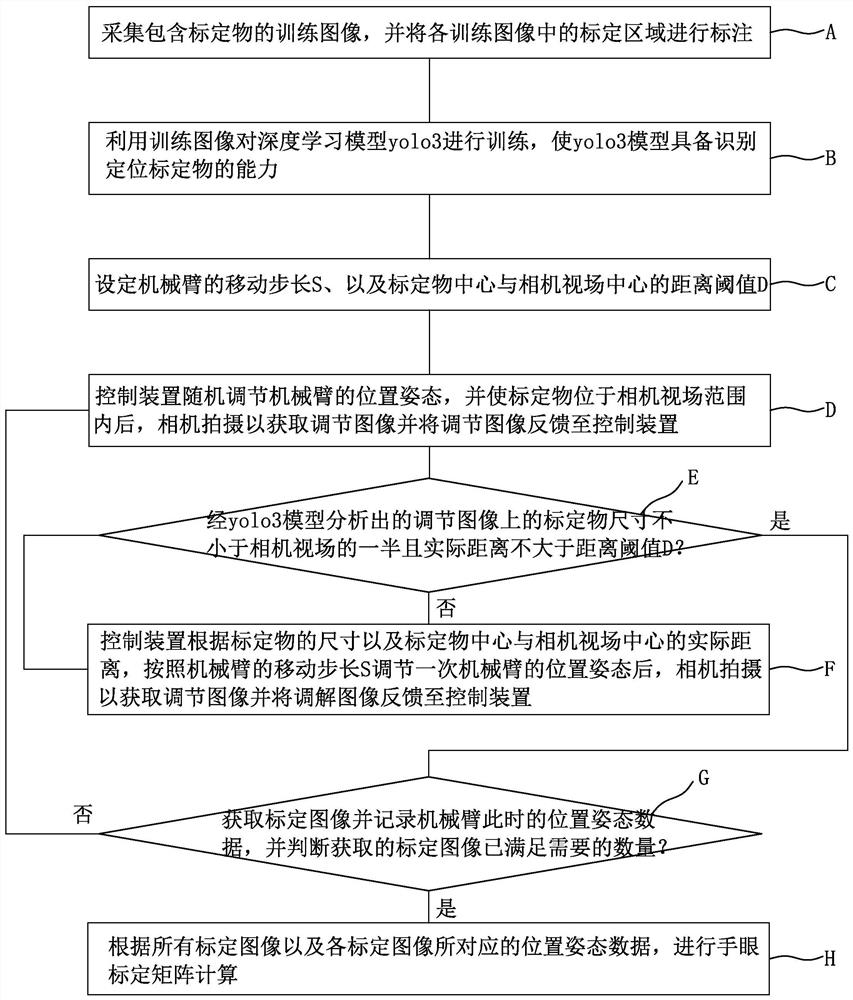
[0034] Such as figure 1 As shown, the hand-eye calibration method based on deep learning includes the following steps:
[0035] A. Collect training images containing calibration objects, and mark the calibration object areas in each training image; specifically: place the calibration objects in different scenes, and adjust the calibration object positions to shoot different angles of view of the calibration objects ( For example, the calibration object is located in the middle of the training image, and part of the calibration object is located in the training image), by adjusting the camera model, shooting the calibration object in different fields of view to obtain a sufficient number of training images, and using image labeling tools (such as labelimage software) to mark out the calibration object area in each training image; the calibration object can be an object with a special mark, which is a prior art;
[0036] B. Use the training image to train the deep learning mode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More