Trilateral positioning method, device and system
A technology of three-sided positioning and ranging method, applied in the field of positioning, can solve the problem of low positioning accuracy, and achieve the effects of improving accuracy, reducing error rate, and solving low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
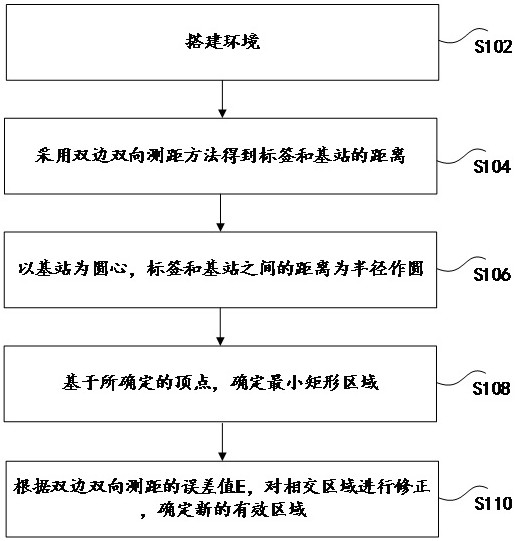
[0028] figure 1 is a trilateration positioning method according to an embodiment of the present disclosure, such as figure 1 As shown, the method includes the following steps:
[0029] Step S102, setting up the environment.
[0030] When performing distance measurement and positioning on tags, the environment must first be set up. The positions of the three base stations are fixed and known. Let the coordinates of the three base stations be , and the coordinates of the labels are set to .
[0031] Step S104, using the bilateral two-way ranging method to obtain the distances between the tag and the base station as ;
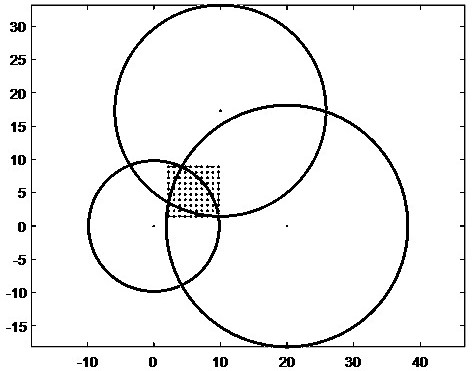
[0032] Step S106, take the base station A, B, C as the center of the circle, the distance between the tag and the base station make a circle with radius, .
[0033] Establish a system of equations to obtain the intersection point where the three circles intersect two by two, denoted as and ;Select the vertices of the intersection area of 3 ci...
Embodiment approach 2
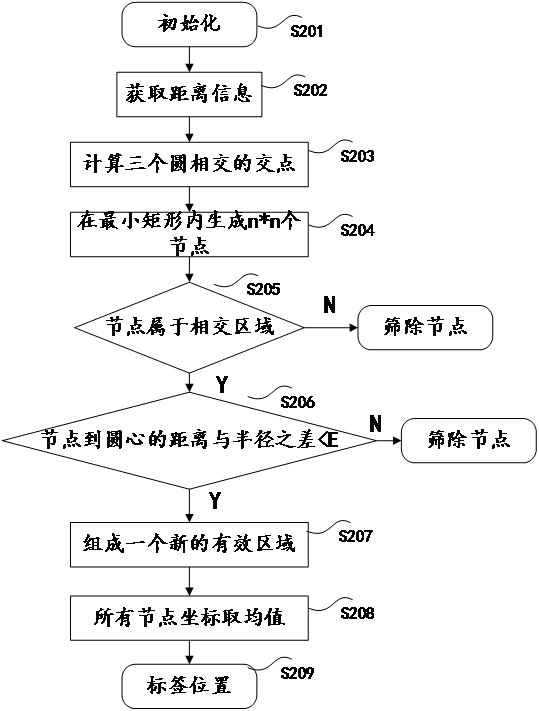
[0043] The embodiment of the present disclosure also provides a trilateral positioning optimization method based on UWB ranging. In this method, the point coordinates in the intersecting area of the three circles are judged according to the ranging error, and invalid data points are screened out to form The new effective area, and then take the average value to get the estimated coordinates of the label, which improves the positioning accuracy compared with the traditional trilateral positioning algorithm.
[0044] Such as figure 2 As shown, the method includes the following steps:
[0045] Step S201: initialization.
[0046] When performing distance measurement and positioning on the tag, first set up the environment and set up three base stations. The positions of the three base stations are fixed and known, and the coordinates of the three base stations are set as , and the coordinates of the labels are set to .
[0047] Step S202, acquiring distance information. ...
Embodiment approach 3
[0081] In one embodiment, both the base station and the tag in step S102 in the first embodiment have a UWB signal transceiving function, and the specific communication steps to realize the bilateral two-way ranging method are as follows:
[0082] Step S1021, data initialization.
[0083] The tag sends a POLL packet, records the sending time T1, and opens receiving.
[0084] In step S1022, the base station should enable reception in advance, and record the arrival time T2 after receiving the POLL packet.
[0085] Step S1023, the base station sends a response (Reply) packet at time T3 (T3=T2+T1), and waits for data reception after completion.
[0086] Step S1024, the tag receives the Reply packet, and records the time T4.
[0087] Step S1025, the tag sends a final (Final) packet at T5 (T5=T3+T4);
[0088] Step S1026, after receiving the Final packet, the base station records the time T6, and then calculates four time differences;
[0089] Such as Figure 7 as shown,
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More