Unmanned driving hierarchical motion decision control method based on deep reinforcement learning
A reinforcement learning, unmanned driving technology, applied in the direction of control devices, to achieve the effect of sharing decision-making pressure, good interpretability and adjustment, and alleviating the problem of data dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, content and advantages of the present invention clearer, the present invention will be further described in detail with reference to the accompanying drawings. The specific steps to implement the case are as follows:
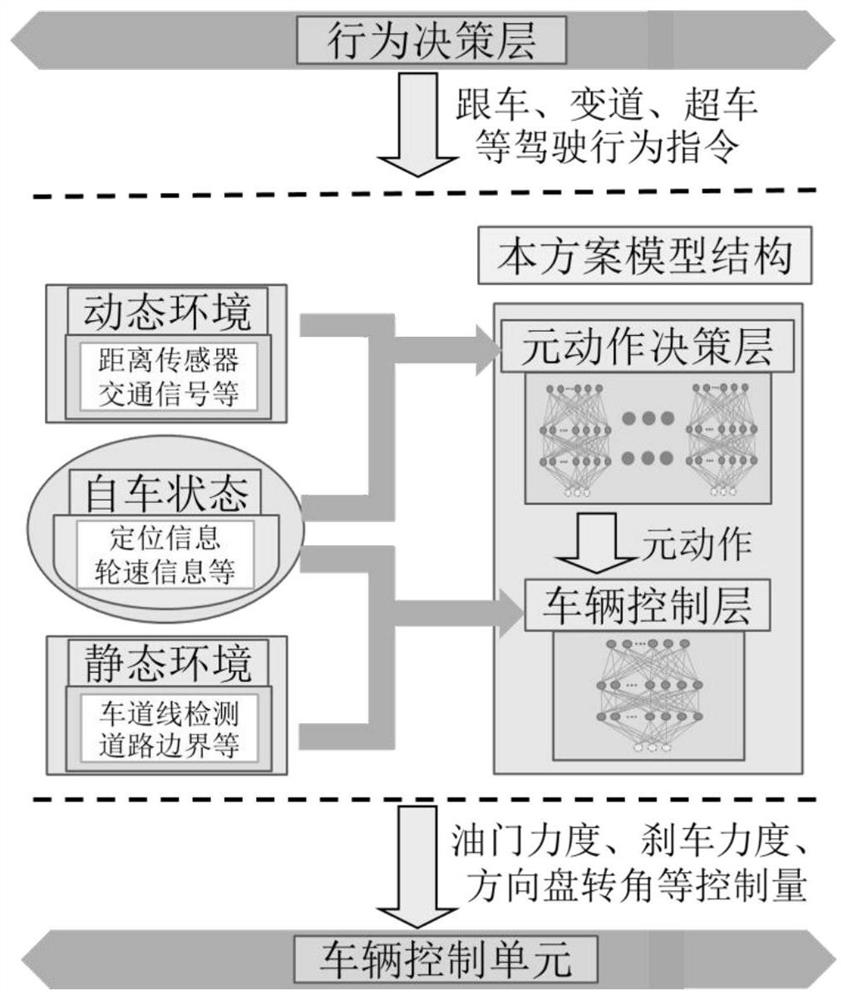
[0045] Step 001: Configure the target driving state (such as target speed, lateral offset position, etc.) for lane keeping in the target scene for the motion decision-making control model, and determine the target driving behavior, and create a motion control model framework, such as figure 1 shown.
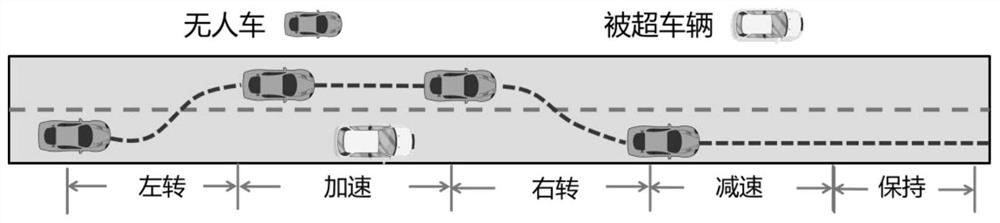
[0046] Step 002: Combining with the execution characteristics of the target driving behavior, decompose the execution process of the driving behavior into meta-action sequences, and establish a reward function that meets the corresponding driving behavior optimization goals.
[0047] Step 003: The vehicle control layer instructs the vehicle to output three reasonable control signals of brake, accelerator and steering, learns to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com