

Pedestrian trajectory prediction method based on multiple hidden variable predictors and key points
A trajectory prediction and predictor technology, applied in the field of computer vision and autonomous driving, can solve the problems of slow training and inference, and achieve the effect of reducing memory overhead, improving prediction accuracy, and improving prediction accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to enable those skilled in the art to better understand the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
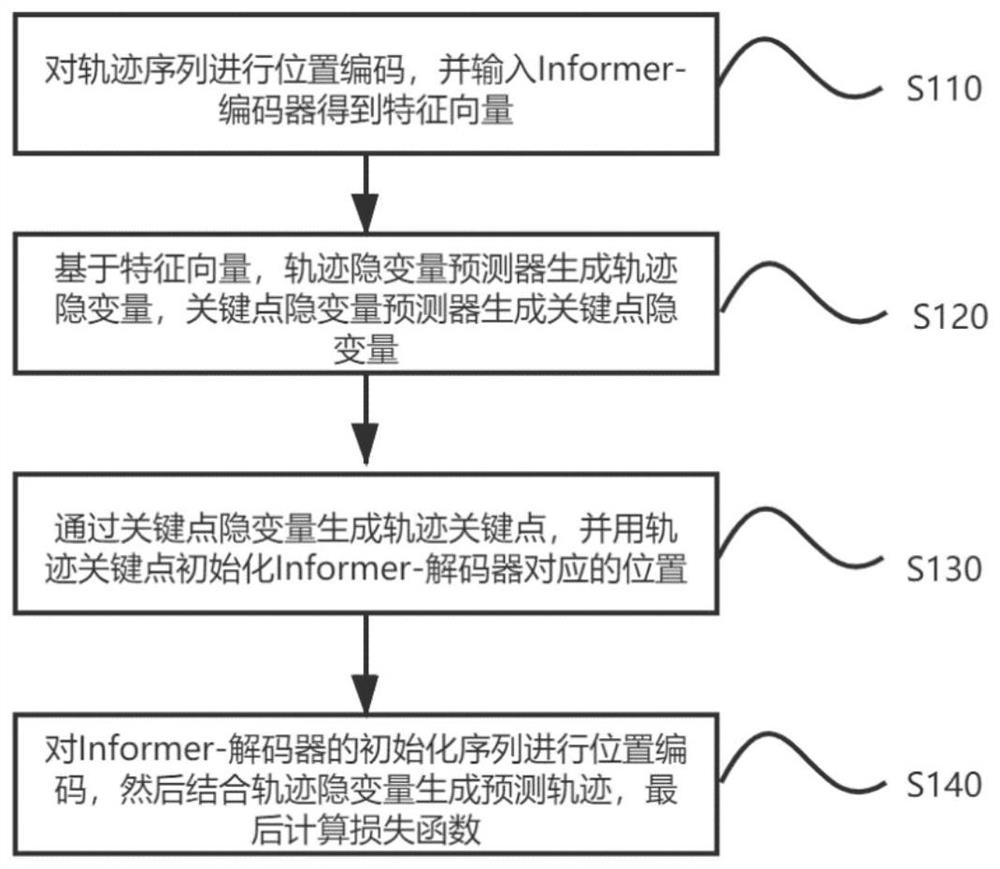
[0032] as attached figure 1 Shown: A pedestrian trajectory prediction method based on multiple latent variable predictors and key points, the method includes the following steps:
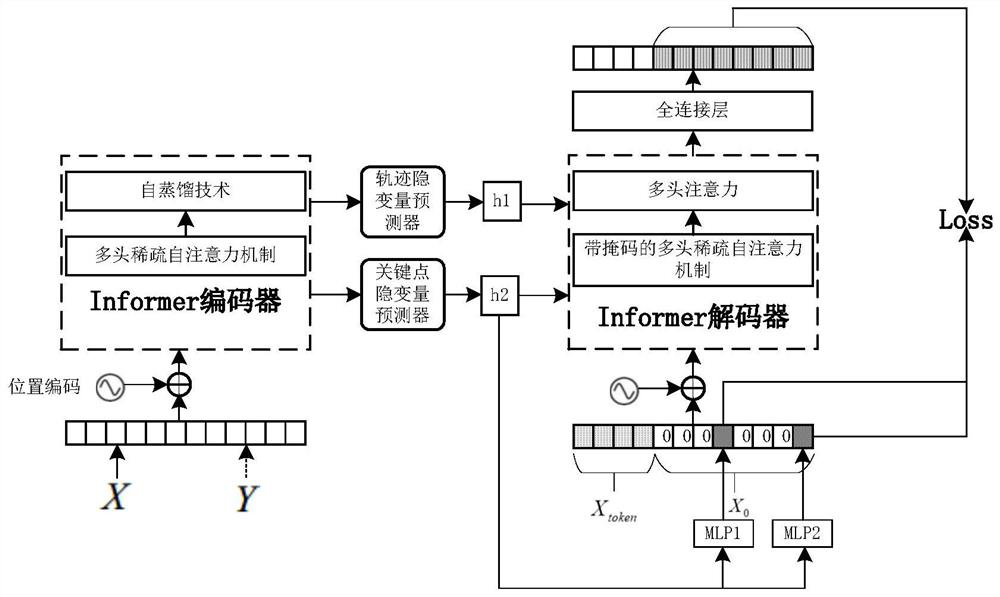
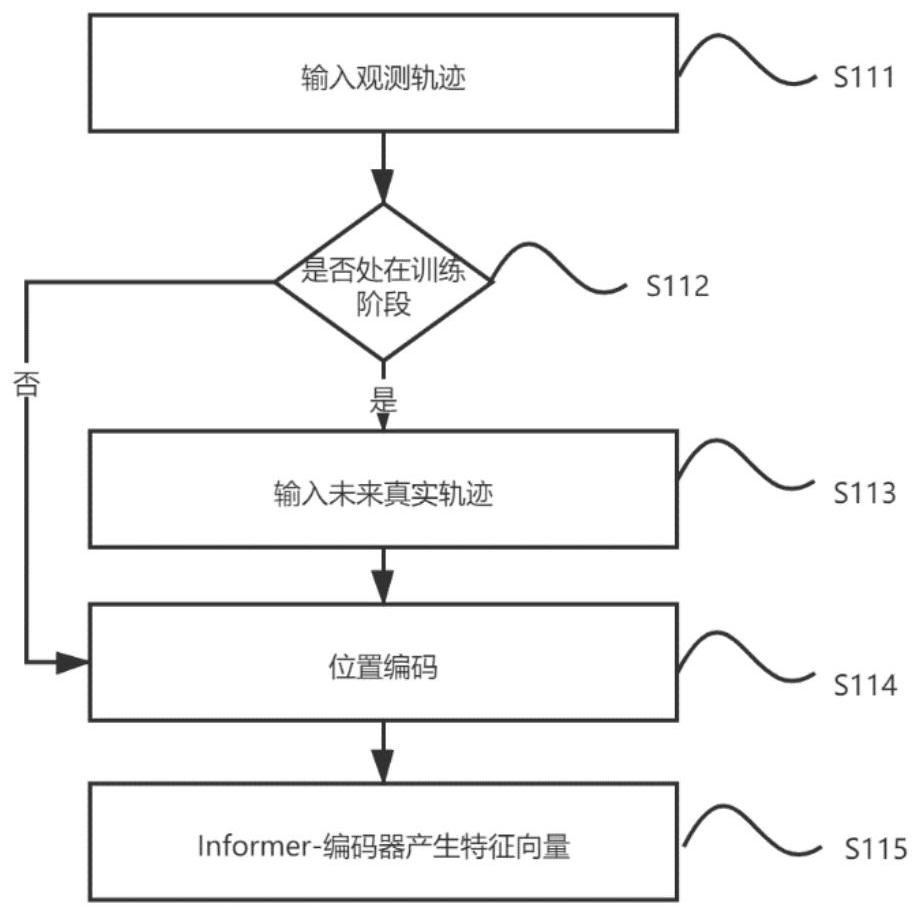
[0033] Step S110, perform position encoding on the trajectory sequence, and input it into an Informer-encoder to obtain a feature vector.
[0034] Step S120, based on the feature vector, the trajectory hidden variable predictor generates a trajectory hidden variable h 1 , the keypoint hidden variable predictor generates the keypoint hidden variable h 2 .
[0035] Step S130, through key point hidden variable h 2 Generate trajectory key points, and initialize the position corresponding to the Informer-decoder with the trajectory key points.
[0036] Step S140, perform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More