

Vision-based indoor unmanned aerial vehicle path planning method
A path planning and unmanned aerial vehicle technology, applied in image analysis, image enhancement, navigation and other directions, can solve the problems of difficulty in obtaining a global map in advance, large amount of calculation, poor real-time performance, etc., to save memory overhead, strong real-time performance, and computational small amount of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
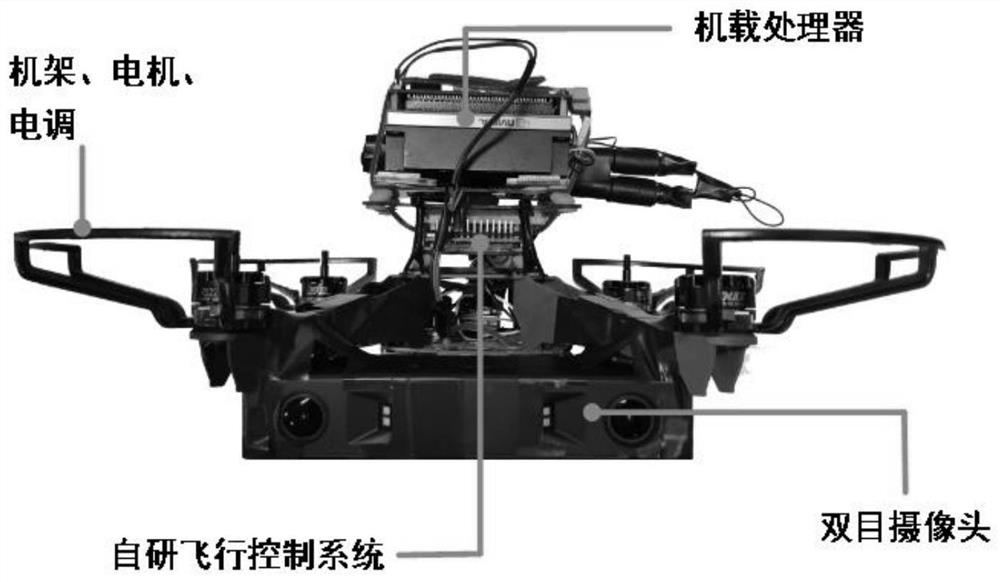
[0211] The platform adopted in the present invention is as attached image 3 As shown, the surrounding environment information is obtained through the binocular camera, the obstacle position is obtained through the onboard processor calculation and the safe flight trajectory of the drone is planned, and finally the self-developed flight control autopilot is used to make the drone fly safely according to the planned flight trajectory. Finally, the indoor autonomous flight mission was realized.
[0212] The present invention takes the indoor actual test flight as the result display, and the indoor task flow is as attached Figure 4 As shown, the artificially set main target points and their key orientations in this experiment include the target point ABCDE, where the dots of each color represent the position of the target point, and the arrows represent the target nose orientation corresponding to each target point. Target point A is the initial target point, which mainly reali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More