

NURBS (Non-Uniform Rational B-Spline) curve velocity interpolation method based on parameter encryption
A parametric and interpolation technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low efficiency of second-order derivation calculations, and achieve the effects of avoiding complex numerical calculation methods, high calculation efficiency, and reducing vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
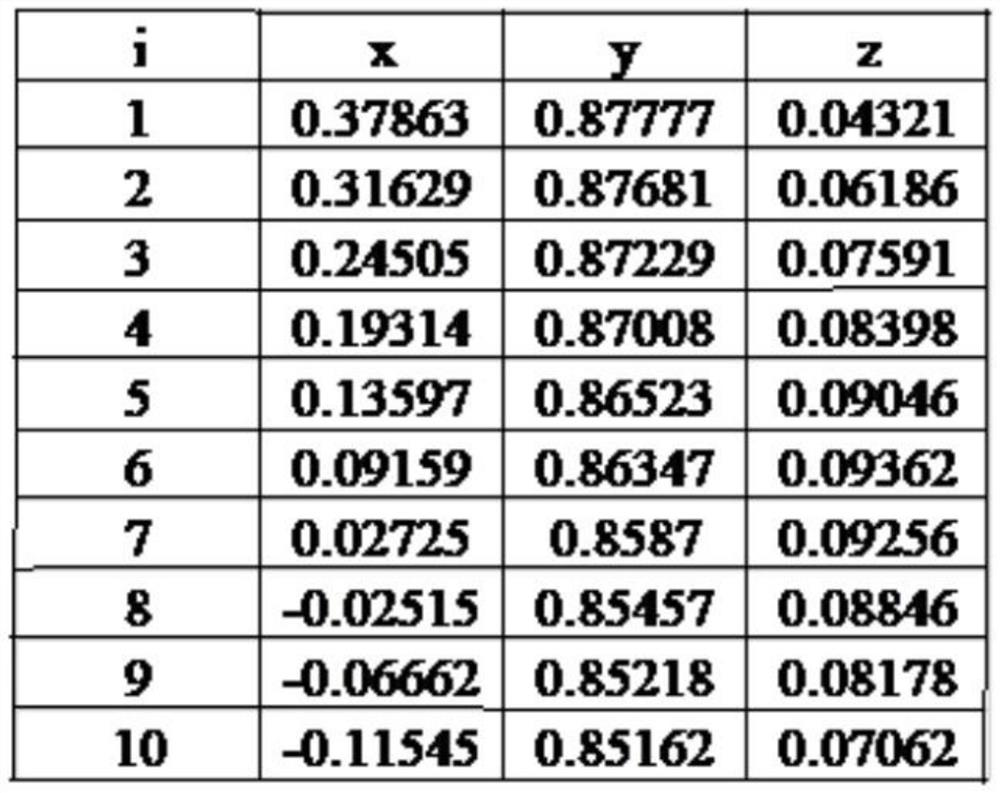
[0114] Embodiment 1: Randomly take ten discrete points as type value points, and the coordinates of type value points are as attached drawings figure 1 ;
[0115] Carry out cumulative chord length parameterization to solve the node vector of the cubic NURBS curve, and set the repetition degree of the first and last nodes to 4, and obtain the node vector as follows:
[0116]
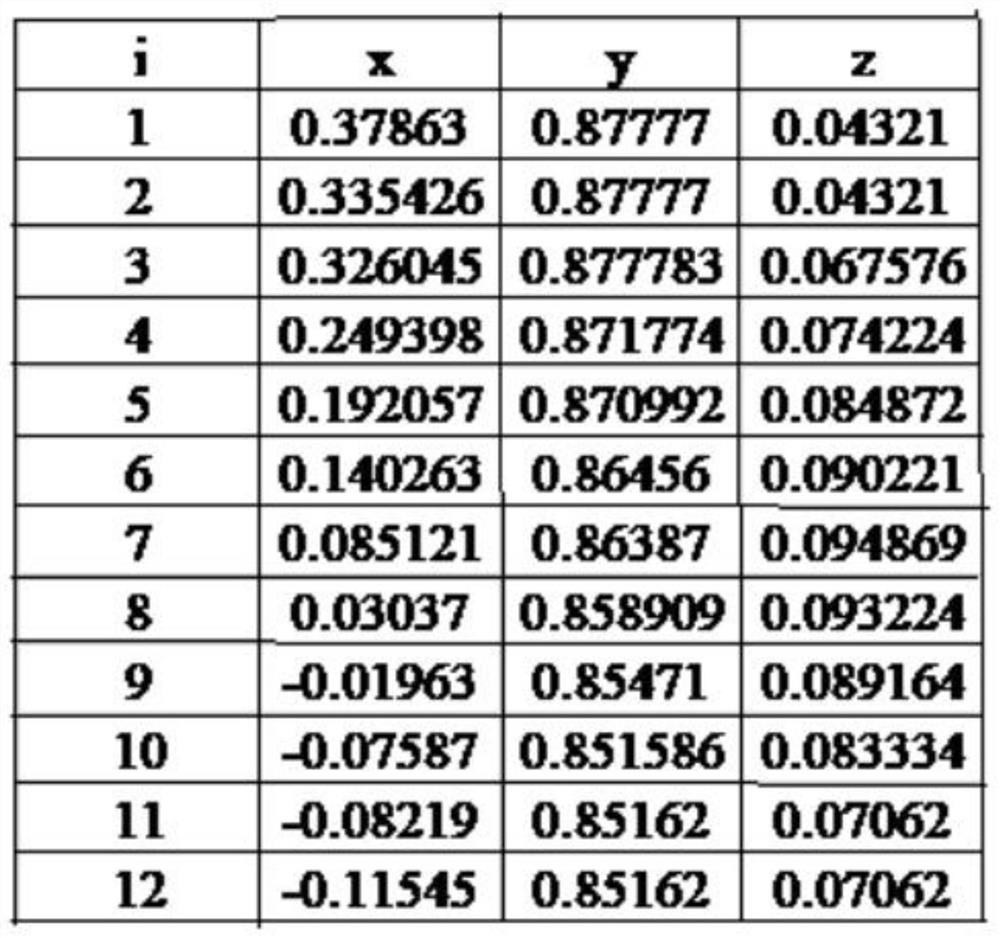
[0117] Select the first tangent vector condition {-1,0,0} to inversely calculate the control vertices, and obtain the control vertices as shown in the attached figure figure 2 ;
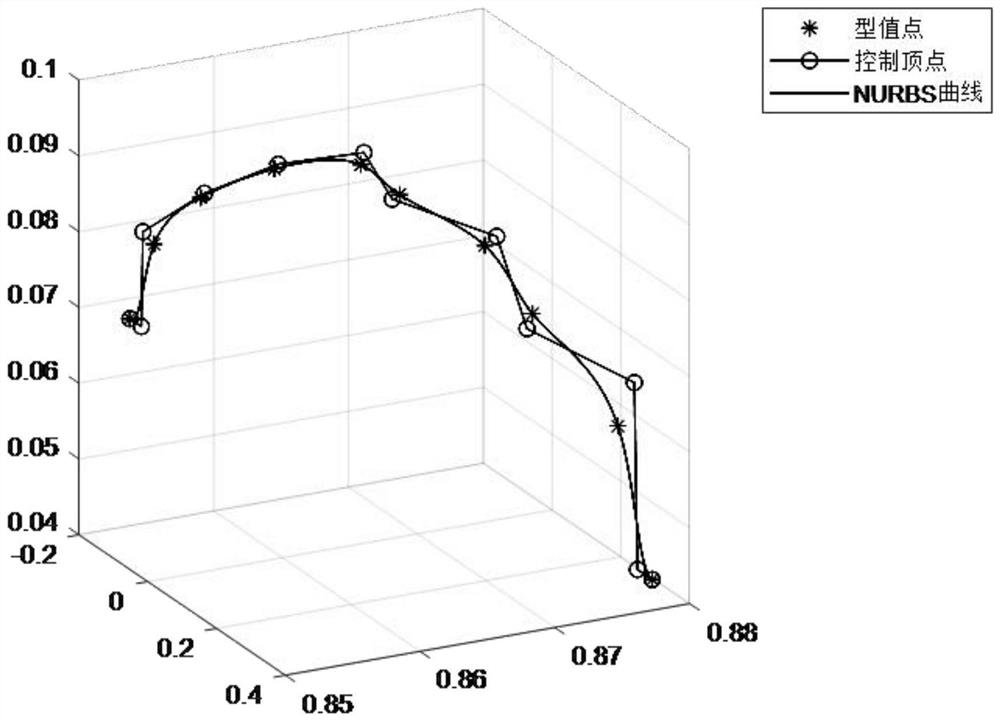
[0118] A complete NURBS fitting curve can be obtained by substituting the uniform parameterization between any two node vectors into the De-Boor recursive formula (see attached figure image 3 ).
[0119] Use the chord length between any two points on the NURBS fitting curve to approximate the arc length (see the attached figure for the arc length data Figure 4 ), the arc length is cumulatively parameterized to obtain t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More