

A creeping vehicle speed control system and its control method
A vehicle speed control and creeping technology, which is applied in the field of vehicle control, can solve the problems of not being able to meet the driver's different needs for creeping speed, and not considering the different needs of different drivers, so as to reduce the frequency of operating the accelerator and braking , Realize real-time adjustment and reduce driving intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
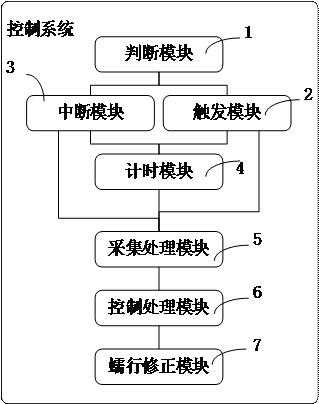
[0054] figure 1 A schematic structural diagram of a creeping vehicle speed control system provided by an embodiment of the present invention; this embodiment provides a creeping vehicle speed control system, including:
[0055] Judgment module 1, used to detect whether the current vehicle state meets the correction condition of creeping vehicle speed;
[0056] A trigger module 2, configured to generate a trigger command when the current vehicle state meets the correction condition of the creeping vehicle speed;
[0057] Interrupt module 3, when detecting that the current vehicle state does not meet the correction condition of creeping vehicle speed, generate an interrupt command;
[0058] The timing module 4 is used to record the time period data between each generated trigger instruction and the corresponding generated interrupt instruction;
[0059] Acquisition and processing module 5, used for collecting and processing creeping parameter information in time period data ac...
Embodiment 2
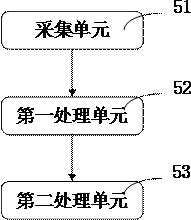
[0064] As an implementable way, on the basis of the above-mentioned embodiments, refer to the attached Figure 2-3 It can be seen that, in order to further improve the reliability of the creeping vehicle speed control system, the acquisition processing module 5 includes: an acquisition unit 51 for n The real-time vehicle speed and road slope are collected according to a fixed time interval, and the fixed time interval can be calibrated, such as 0.1S, etc.;
[0065] The first processing unit 52 is used for according to the time period data t n The arithmetic mean value of each vehicle speed and road gradient collected in the network is taken as the average vehicle speed V n and the average road slope i n ; The second processing unit 53 is used to generate the average vehicle speed V n Compare with the pre-stored creep target vehicle speed V to obtain the difference δV n .
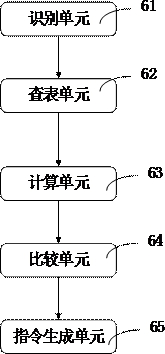
[0066] Control processing module 6 includes:
[0067] The identification unit 61 is used to judge w...
Embodiment 3
[0075] Figure 4 It is a schematic flow chart of a creeping vehicle speed control method provided by an embodiment of the present invention; this embodiment provides a creeping vehicle speed control method, and the execution subject of the creeping vehicle speed control method may be a creeping vehicle speed control system, Specifically, the following steps are included:
[0076] S100. Detecting whether the current vehicle state meets the correction condition for creeping vehicle speed;
[0077] S200. When the current vehicle state satisfies the correction condition of the creeping vehicle speed, generate a trigger instruction;
[0078] S300. When it is detected that the current vehicle state does not meet the correction condition of the creeping vehicle speed, an interrupt command is generated;
[0079] S400. Record the time period data between each generated trigger instruction and the corresponding generated interrupt instruction;
[0080] S500. Collect and process creep...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More