Hip joint mechanism and foot type robot
A hip joint and robot technology, applied in the field of robotics, can solve problems such as the inability to adjust the angle of the two feet, the high moment of inertia of the footed robot, and the inability to meet different functional requirements, etc., to achieve compact structure, improved flexibility, and low drive torque. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
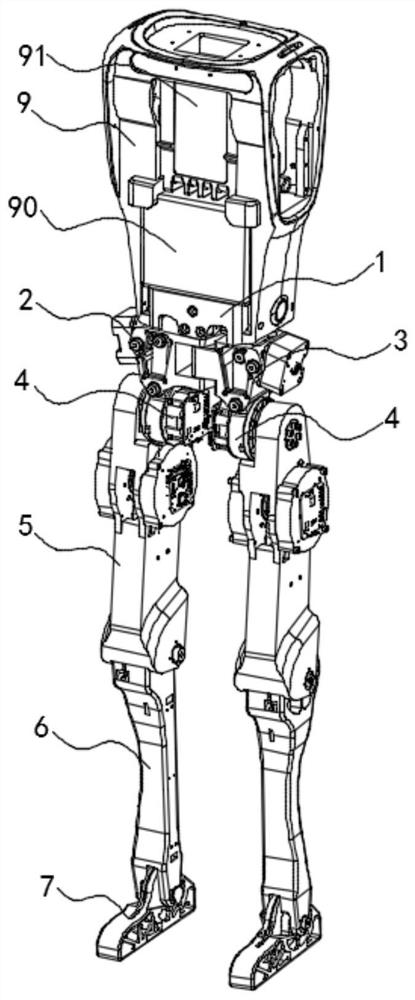
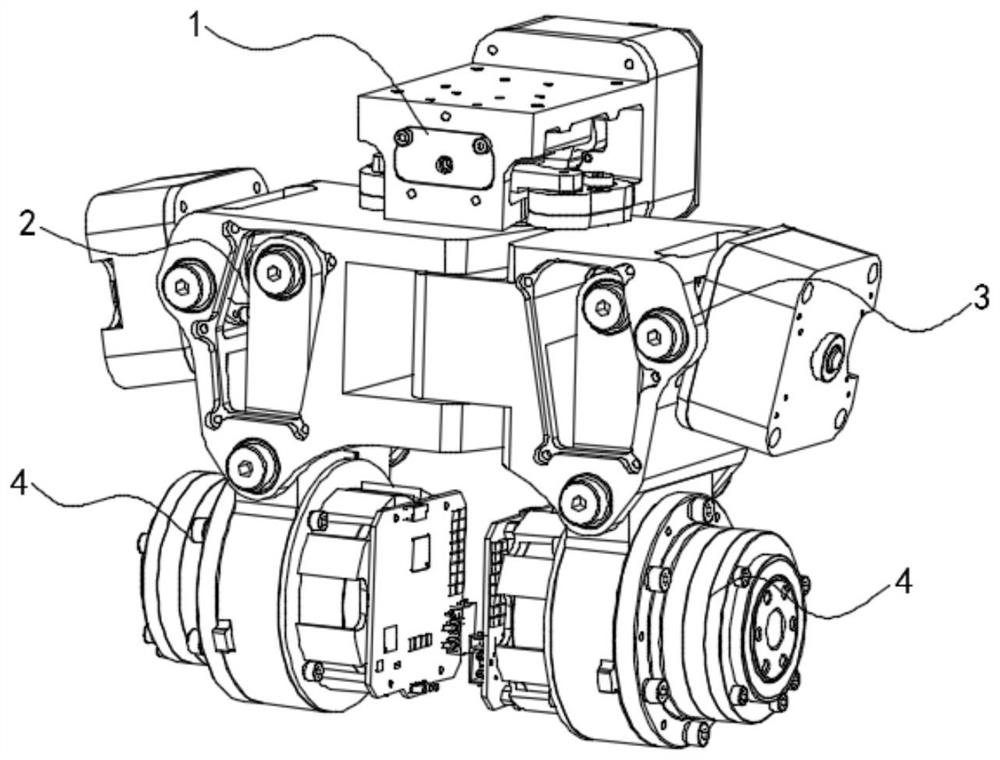
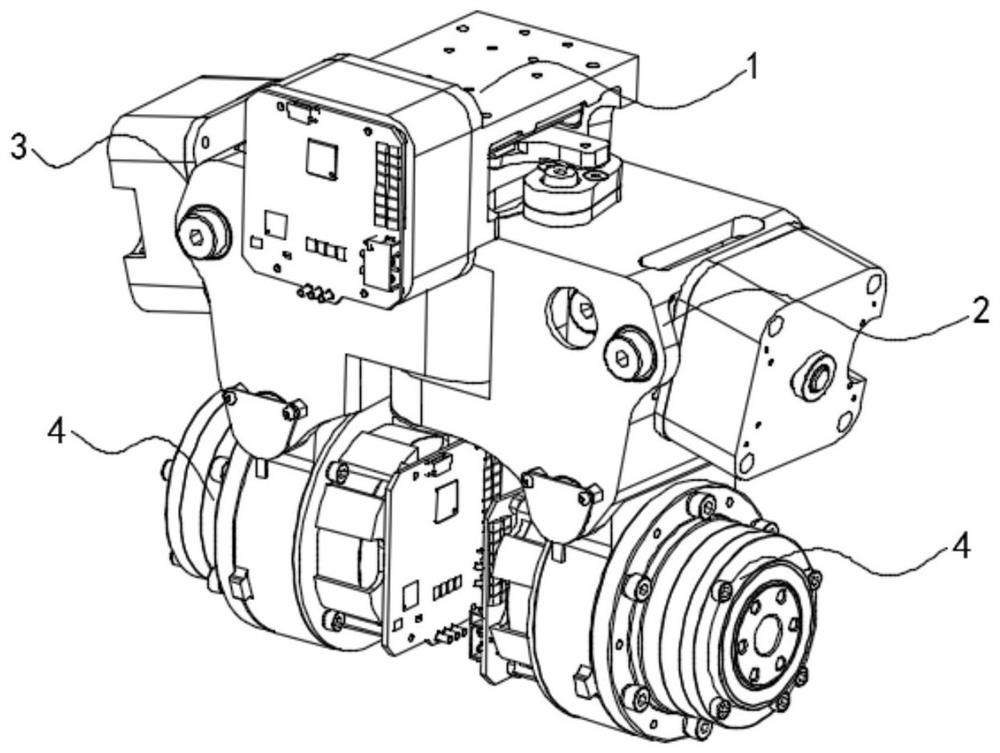
[0030] Please refer to Figure 2-Figure 7 , the present invention provides a hip joint mechanism, comprising: an angle adjustment mechanism 1, a left swing drive mechanism 2, a right swing drive mechanism 3, and two front and rear drive mechanisms 4; the angle adjustment mechanism 1 is used to adjust the left swing drive mechanism 2. The included angle between the right swing driving mechanism 3, when connected with the legs and feet 7 of the legged robot, can further drive the legs and feet 7 to move, and realize the adjustment of the angle between the two feet 7; The left swing drive mechanism 2 and the right swing drive mechanism 3 cooperate to drive the angle adjustment mechanism 1 to bend and swing leftward and rightward; the two front and rear drive mechanisms 4 are used to drive the left swing drive mechanism 2 , right pendulum drive ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More