Transformer substation robot indoor navigation positioning method based on double-path laser
An indoor navigation and positioning method technology, applied in the field of substations, can solve problems such as unfavorable operation, achieve the effects of improving positioning accuracy, improving operation safety and efficiency, and reducing operation cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
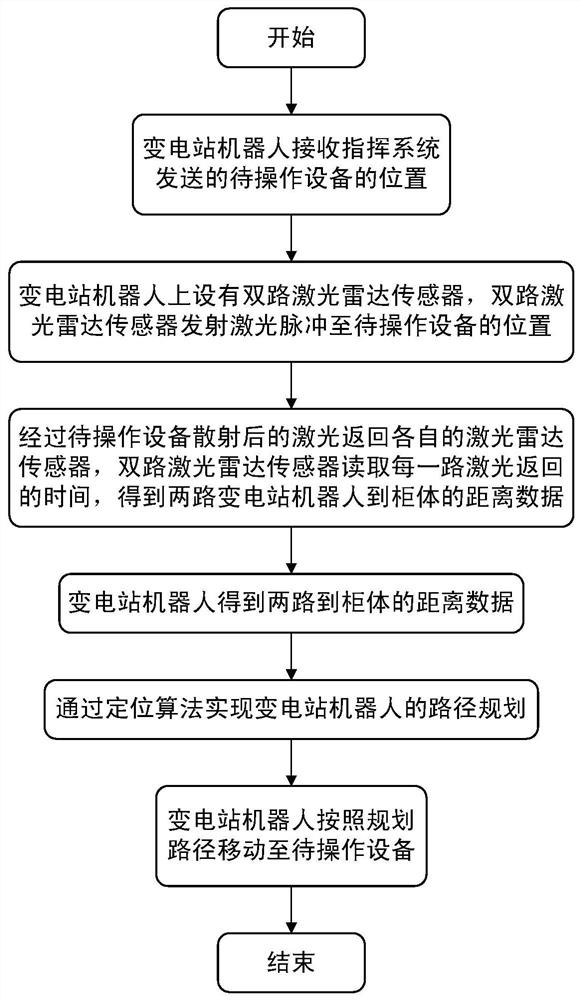
[0035] This embodiment provides a method for indoor navigation and positioning of substation robots based on two-way lasers, such as figure 1 As shown, it includes the two-way laser data calibration stage and the robot path navigation displacement stage; the two-way laser data calibration stage and the robot path navigation displacement stage are carried out first;
[0036] The dual sensor data calibration phase consists of the following steps:
[0037] A1. The substation robot receives the position of the equipment to be operated sent by the command system;
[0038] A2. The substation robot is equipped with a dual-channel laser radar sensor, which emits laser pulses to the position of the equipment to be operated;
[0039] A3. The laser light scattered by the equipment to be operated returns to its respective laser radar sensor, and the dual laser radar sensor reads the return time of each laser beam to obtain the distance data from the two substation robots to the cabinet; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com