Large-view-field reference plane calibration method in optical deflection three-dimensional measurement
A reference plane and three-dimensional measurement technology, applied in image analysis, instruments, calculations, etc., can solve the problems of noise sensitivity, inability to meet the calibration requirements of large field of view reference planes, poor algorithm stability, etc., to achieve strong stability, high precision, The effect of good algorithm robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
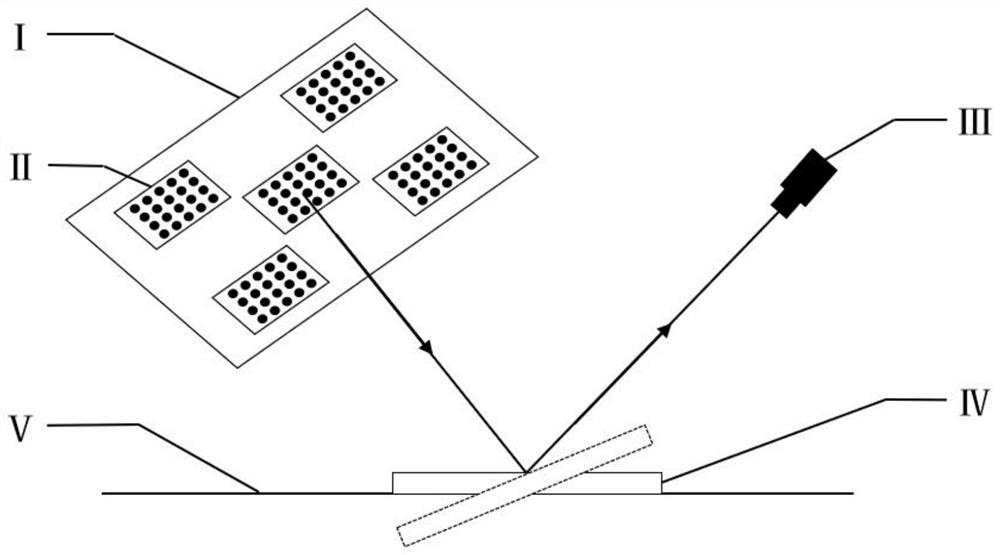
[0047] In the present invention, the large-field-of-view reference plane calibration method in the three-dimensional measurement of optical deflection is a pose calibration method between the camera and the large-field-of-view reference plane by using an auxiliary plane mirror. And it is applied in the calibration system composed of reference plane I, checkerboard calibration plate II, camera III, auxiliary plane mirror IV and optical platform V. In this embodiment, a large-format LCD display is used as a reference plane, and a checkerboard image is generated by a computer as a checkerboard calibration board.
[0048] Step 1, such as figure 1 As shown, a checkerboard calibration plate II is set at a certain position on the reference plane I;
[0049] Utilize the camera III to collect the mirror images of the checkerboard calibration plate II under the auxiliary plane mirror IV at different inclination angles, (the plane mirror can adjust the inclination angle 3 times: tilt ar...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap