

Efficient adaptive robot for mountain forest
A robotic and adaptive technology, applied in the field of robotics, can solve problems such as robot damage, robot replacement, and affecting robot operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
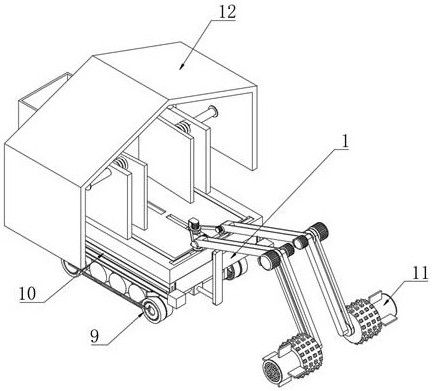
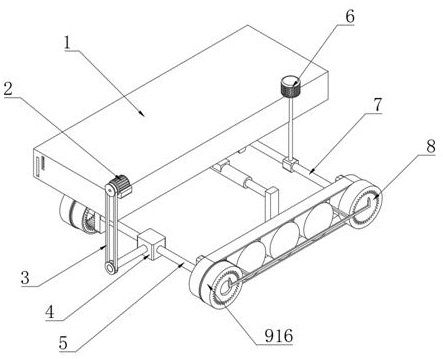
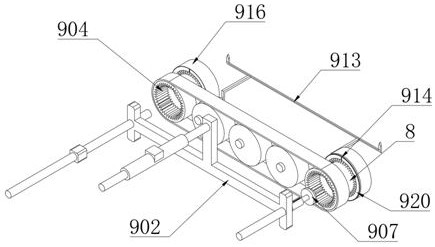
[0046] Example: such as Figure 1-10 As shown, the present invention provides a technical solution, a high-efficiency adaptable robot for mountain forests, including a mounting plate 1, a driving motor 2 is installed at one end of the top of the mounting plate 1, and the output shaft of the driving motor 2 is fixedly connected with a moving belt transmission mechanism 3, and the moving belt The bottom end of the transmission mechanism 3 is connected with the commutator 4 through the connecting shaft, the drive shaft 5 is installed at both ends of the commutator 4, the other end of the top of the installation plate 1 is fixedly installed with the steering motor 6, and the output shaft of the steering motor 6 is fixedly connected with the steering motor 6. The shaft 7, the steering shaft 7, one end of the driving shaft 5 and the two ends of the steering shaft 7 are fixedly equipped with a driving wheel 8, and the input ends of the driving motor 2 and the steering motor 6 are elec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More