

Task scheduling system and method for unmanned motor sweeper
A technology for task scheduling and cleaning vehicles, which is applied in control/adjustment systems, vehicle position/route/height control, motor vehicles, etc., and can solve the problems of relying on manual cleaning, consuming human resources, and consuming time and energy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with drawings and embodiments.
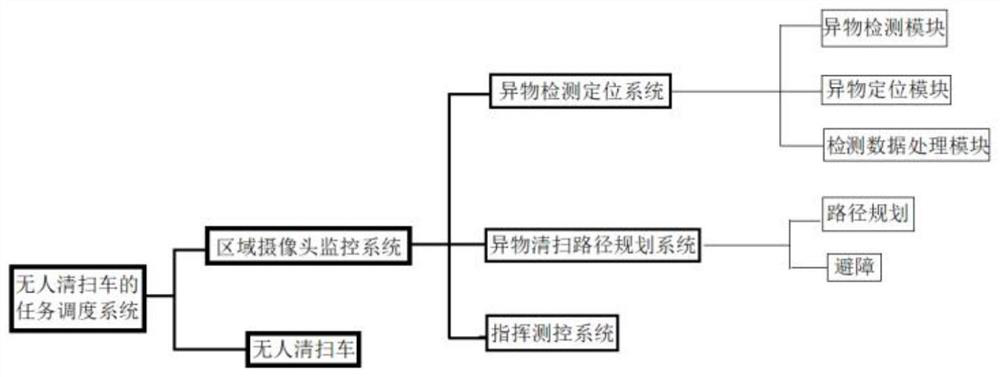
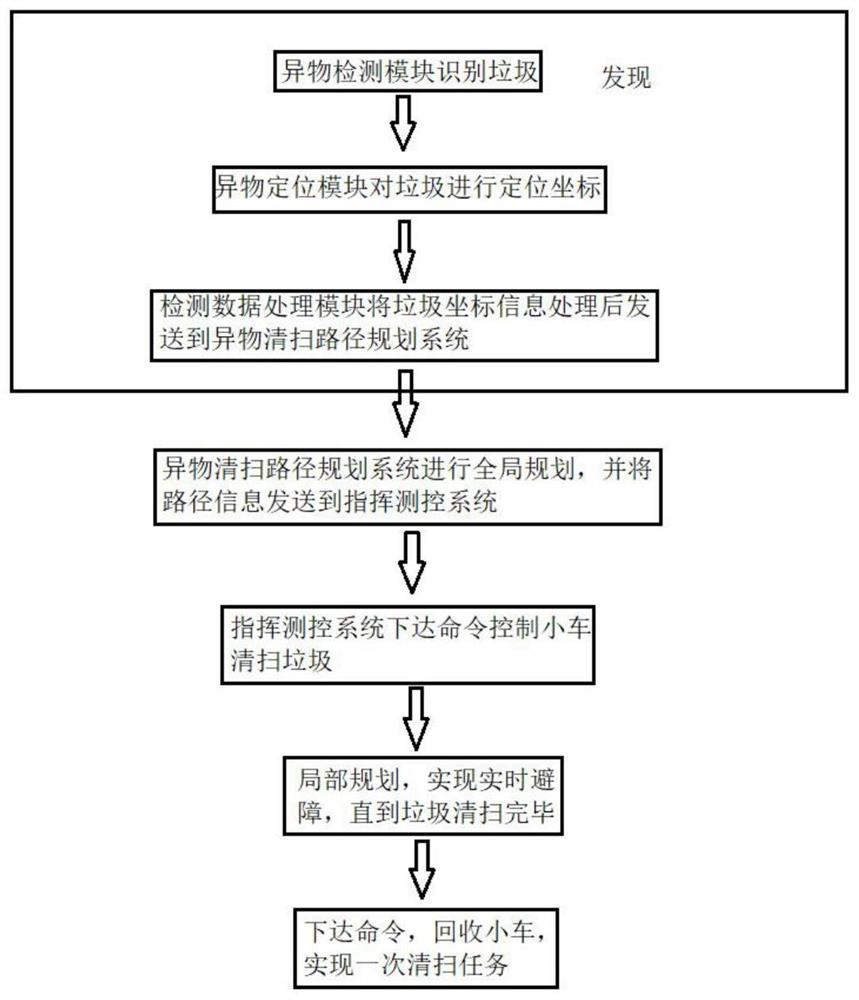
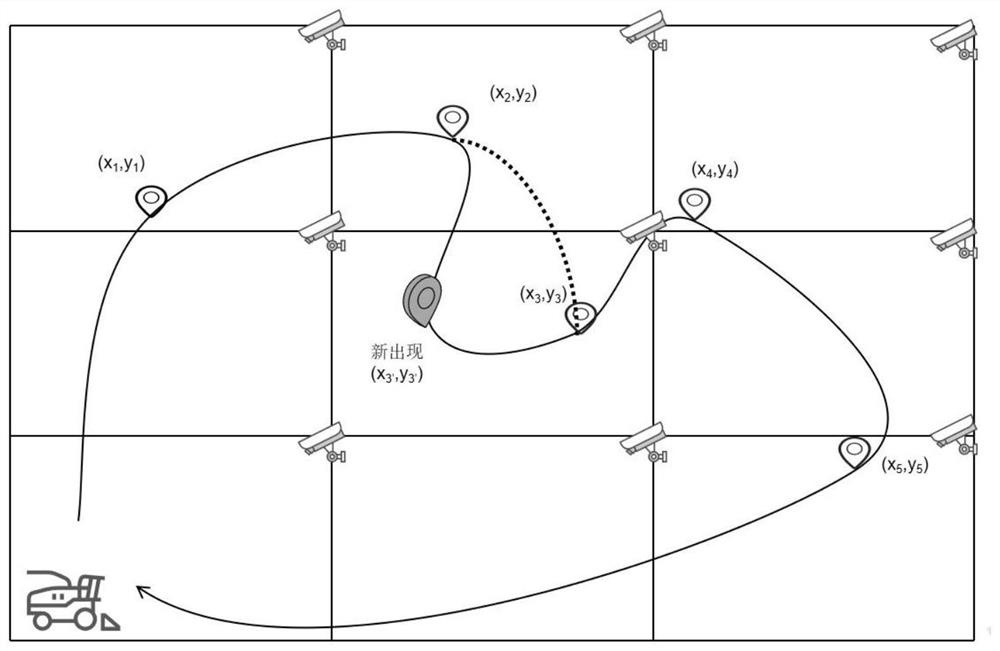
[0031] Such as figure 1 , figure 2 and image 3 As shown, a task scheduling system for an unmanned cleaning vehicle includes an area camera detection system and an unmanned cleaning vehicle; the area camera detection system includes a foreign object detection and positioning system, a foreign object cleaning path planning system and a command measurement and control system;
[0032] Such as figure 1 As shown, the foreign object detection and positioning system includes a foreign object detection module, a foreign object positioning module and a detection data processing module; the foreign object detection and positioning system identifies garbage and other obstacles through visual detection, and transmits the coordinates of the identified garbage to the cleaning path planning The module realizes the detection and positioning of garbage; the foreign object detection...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More