

A method, device, and electronic equipment for time-sequence task planning of a robot
A task planning and robotics technology, applied in instrumentation, design optimization/simulation, comprehensive factory control, etc., can solve the problem that robots have both individual sequential tasks and global collaborative sequential tasks at the same time, so as to reduce waiting time and protect privacy. information, overcoming the effects of higher complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
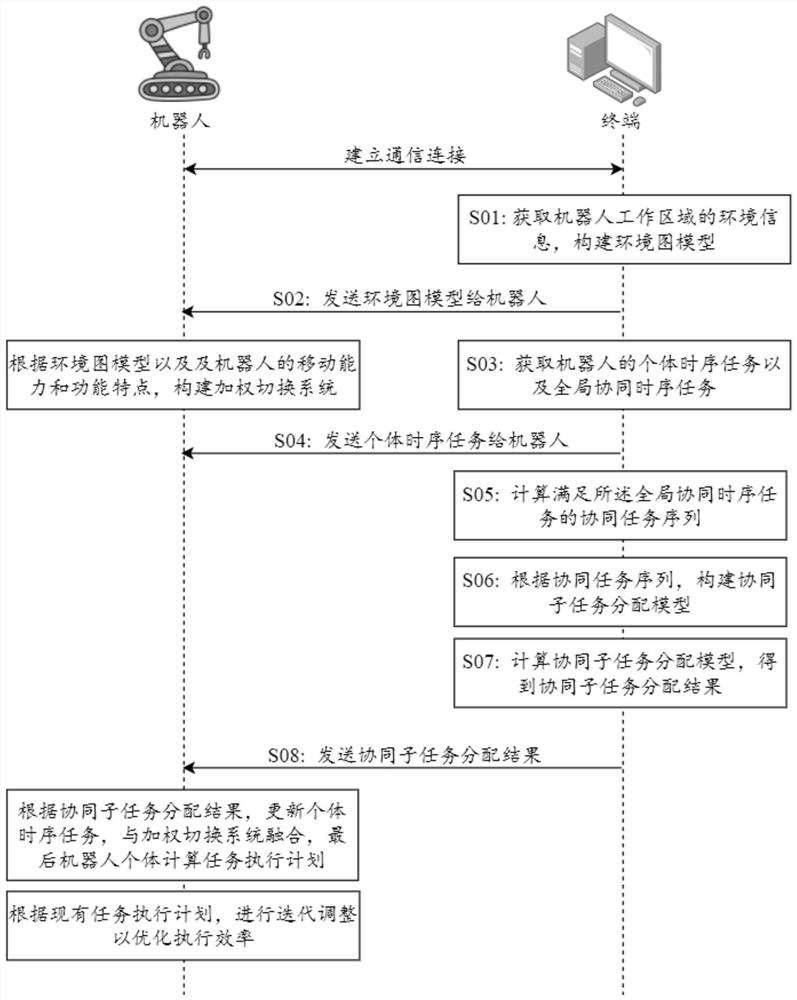
[0018] FIG. 1 is a flowchart of a method for planning a robot time sequence task provided in an embodiment of the present invention. Referring to Figure 1,
[0023] Specifically, the task execution capability includes but is not limited to technical actions such as grasping, moving, and operating. robot i
[0024] Step S03: Obtain the individual time sequence tasks and the global cooperative time sequence tasks of the robot.
[0026] Step S04: Send the individual time sequence tasks to the robot.
[0027] The application does not limit the specific sending method of sending the individual time sequence task to the robot.
[0033] Step S06: According to the collaborative task sequence, construct a collaborative subtask assignment model.
[0037] (1) Collaborative constraints. The number and type of robots required for each subtask needs to be met. for each σ
[0038] (2) Time constraints. Each robot cannot be involved in two tasks that need to be performed at the same time. i....
Embodiment 2
[0063] FIG. 5 is a schematic diagram of a robot sequential task planning device provided in Embodiment 1 of the present invention. This embodiment
[0064] Regarding the apparatus in the above-mentioned embodiments, the specific manner in which each module performs operations has been described in the method
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More