

Bionic robotic fish cluster navigation simulation method based on deep reinforcement learning technology
A technology of reinforcement learning and simulation methods, applied in neural learning methods, biological models, biological neural network models, etc., can solve problems such as slow convergence speed, small action space and state space, and inability to truly reflect the behavior of fish groups
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
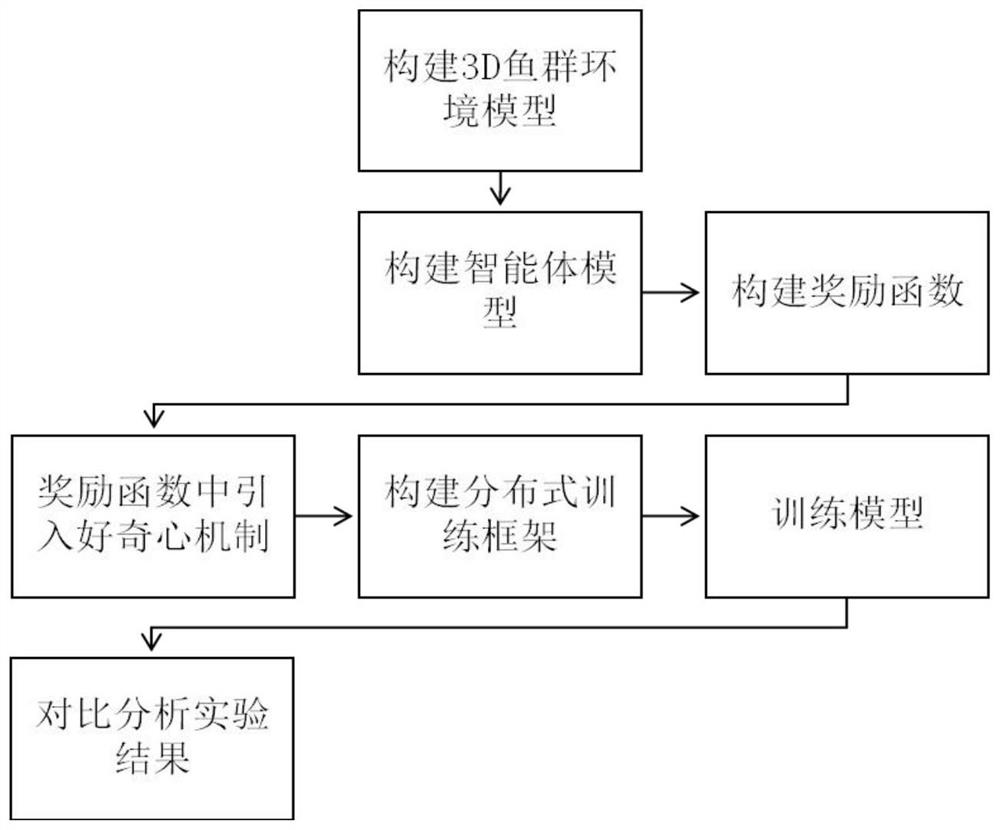
[0062] In this embodiment, the bionic robot fish cluster navigation simulation method based on deep reinforcement learning technology, such as figure 1 shown, including the following steps:
[0063] Step 1, constructing a 3D fish cluster environment model;
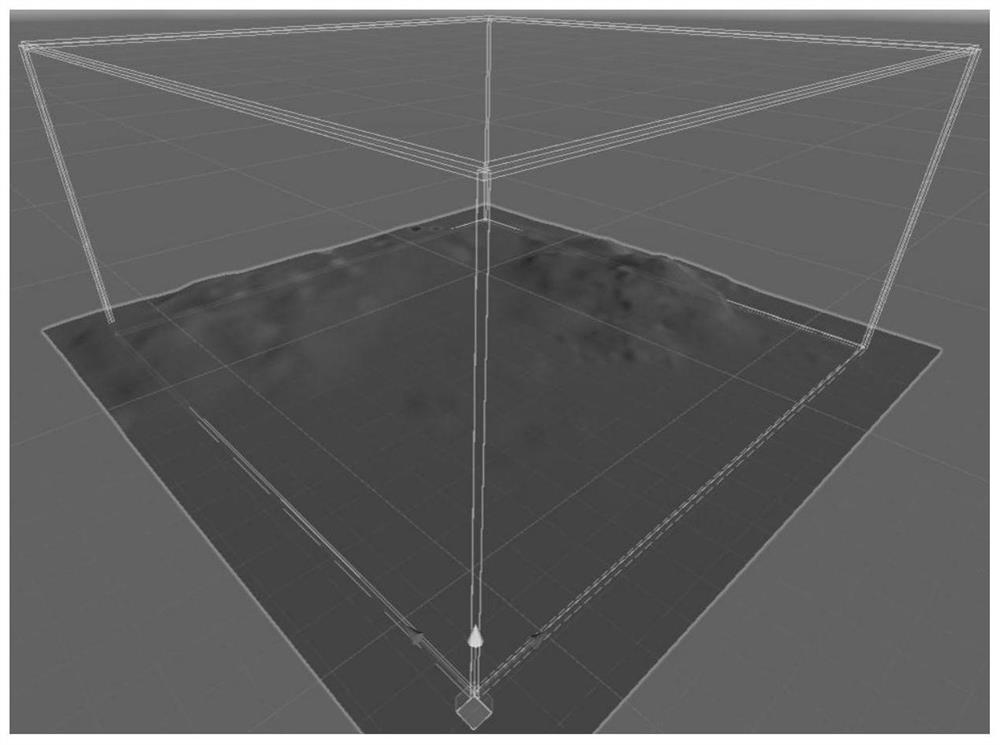
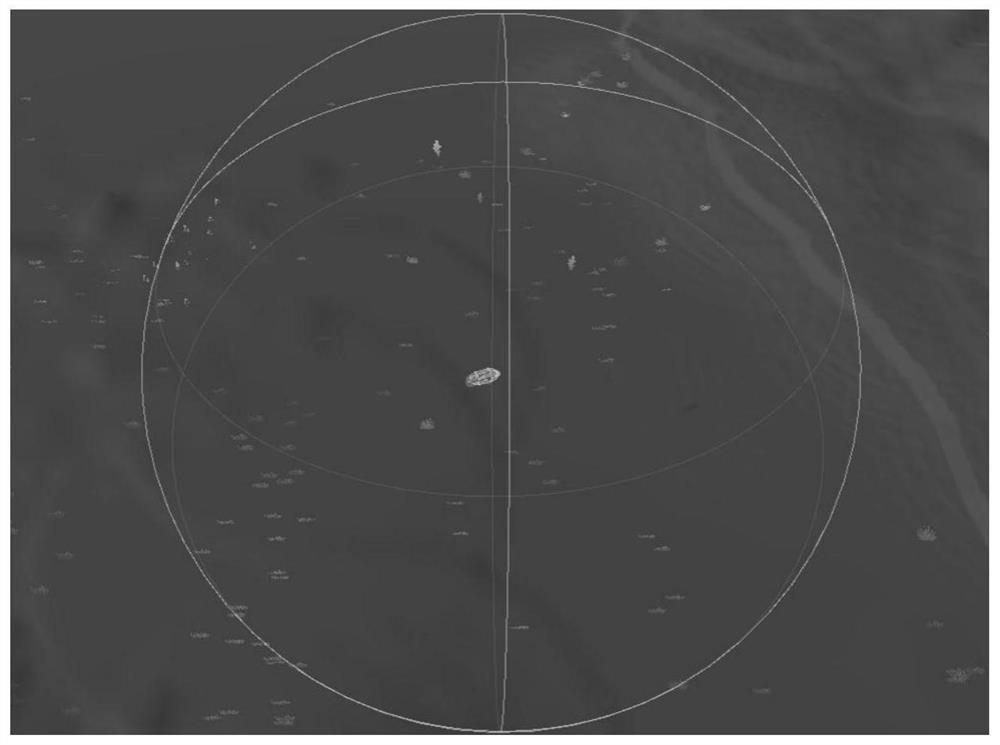
[0064] Step 1.1, build a fish cluster environment;
[0065] In order to simulate the real-world fish cluster environment, a 3D scene is constructed in the Unity3D engine system with the length of a bionic robot fish as 1 unit; the surrounding and top of the 3D scene are set as transparent air walls, and the bottom of the 3D scene simulates a real ocean The terrain is composed of uneven ground and aquatic plants; the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More