

Pipe network dredging robot
A robot and pipe network technology, applied in the direction of cleaning sewer pipes, waterway systems, water supply devices, etc., can solve the problems of inability to completely clean, low efficiency, low dredging efficiency, etc., to achieve strong ability to overcome obstacles and muddy ground, Improve the efficiency of dredging and improve the effect of dredging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to enable those skilled in the art to better understand the technical solution of the application, the application will be described in detail below in conjunction with the accompanying drawings. The description in this part is only exemplary and explanatory, and should not have any limiting effect on the protection scope of the application. .
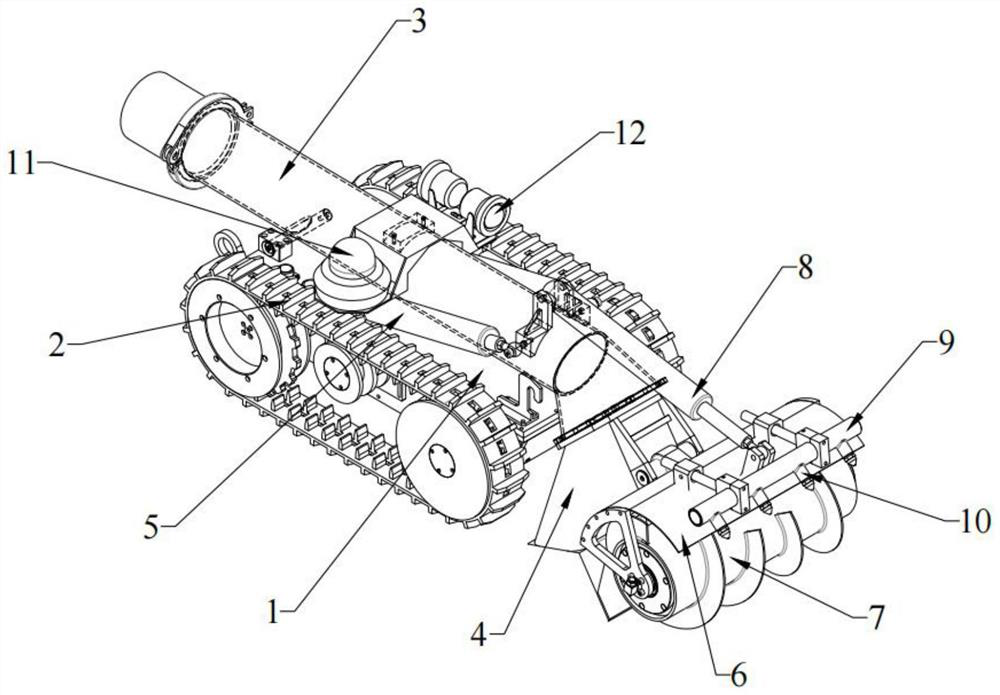
[0021] Please refer to figure 1 , this embodiment provides a pipe network dredging robot, including a base 1, a walking assembly 2, a suction assembly and a crushing assembly.
[0022] The walking assembly 2 is installed on the lower part of the base 1, and is used to drive the base 1 to walk in the pipeline; the walking assembly 2 includes walking crawlers arranged symmetrically on the left and right sides of the base 1; The driving wheel and the driven wheel meshed with it are arranged in the walking track; the driving wheel and the driven wheel are cylindrical structures with the same tooth shape on the outer ring; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More