

High-precision road shortest path calculation method based on surveying and mapping information
A shortest-path, high-precision technology, applied in surveying and navigation, navigation calculation tools, road network navigators, etc., can solve problems such as grid modeling and path planning that cannot be solved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
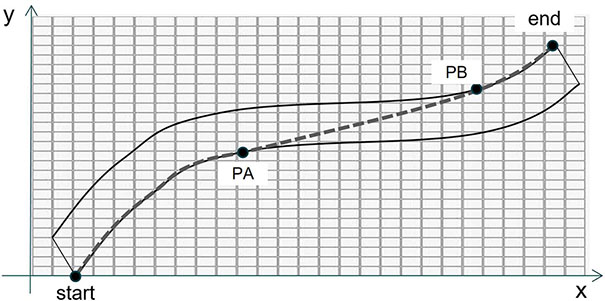
[0028] figure 1 is a schematic diagram of the shortest path constructed in the present invention. The general road space can be composed of several illustrated curves, wherein the dotted line shows the shortest path obtained in step 5, start and end are respectively the designated starting point and end point of the road, start, The line segment between the two points of PA and the line segment between PB and end are the edge segments described in step 6, while the line segment between the two points of PA and PB is the jump segment, as described in step 6, the edge segment and the road The edges coincide, and the jumps are straight lines.
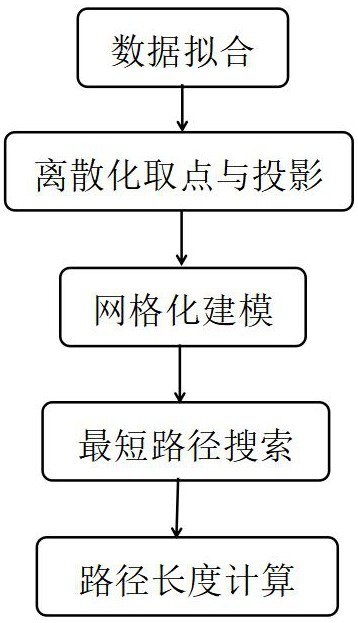
[0029] figure 2 It is a flowchart of the shortest path calculation method constructed in the present invention, including the following links: 1. Data fitting, that is, as described in step 1, fitting ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More