

An amphibious quadruped robot based on deformable floating legs and its driving method
A quadruped robot, amphibious technology, applied to motor vehicles, amphibious vehicles, transportation and packaging, etc., can solve the problems of lack of normal land quadruped robot mobility and complex terrain adaptability, and less research on leg propulsion , to increase the burden and improve the effect of exercise capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present application will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are used to explain the related invention, rather than limit the invention. In addition, it should be noted that, for the convenience of description, only the parts related to the related invention are shown in the drawings.
[0028] It should be noted that the embodiments in the present application and the features of the embodiments may be combined with each other in the case of no conflict. The present application will be described in detail below with reference to the accompanying drawings and in conjunction with the embodiments.
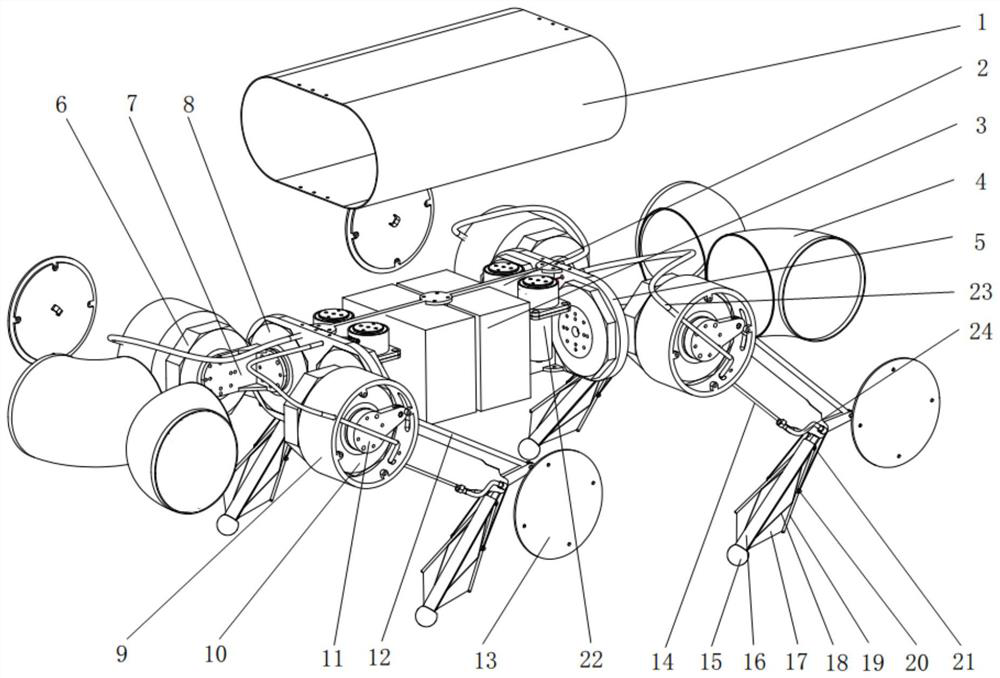
[0029] like figure 1As shown, the amphibious quadruped robot based on the deformable floating legs of the present invention includes a support frame 2 , a sealed shell 1 , floating legs, a flexible driving module of the flippers and an electr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More