

Nonlinear adaptive control method for dual UAV lifting system based on load generalized displacement
A technology of adaptive control and adaptive controller, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve load swing, model construction is not accurate enough, multi-UAV air resistance is not taken into consideration and other problems to achieve the effect of eliminating residual swing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
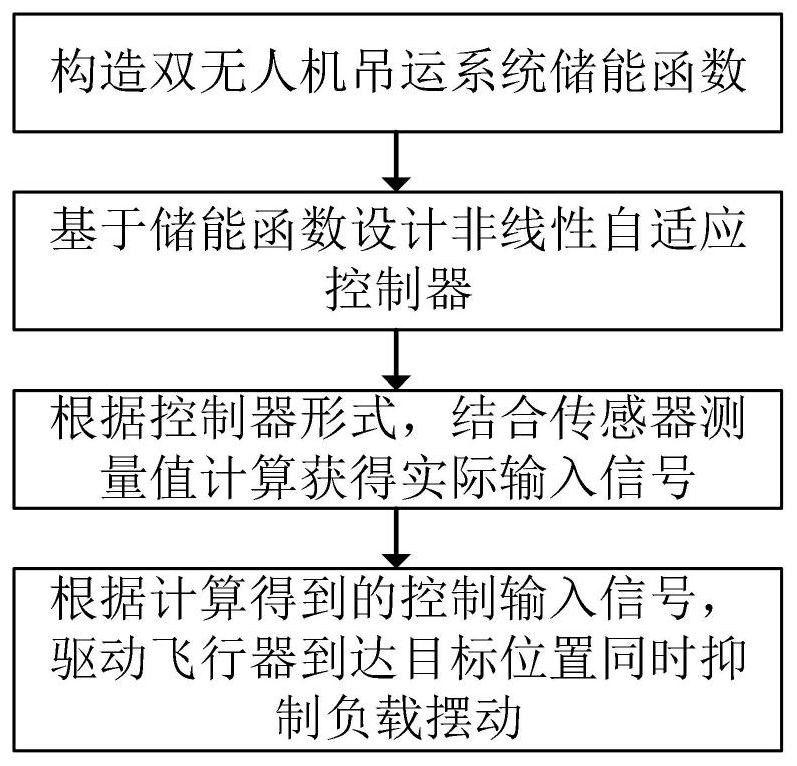
[0043] This embodiment discloses a non-linear adaptive control method for a dual UAV hoisting system based on the generalized displacement of the load. The process of the method is shown in figure 1 ,include:
[0044] First, based on the planar dynamic model of the double UAV lifting the rod-shaped load, the construction of the energy storage function of the system is completed;
[0045] Next, a nonlinear adaptive controller is designed based on the constructed energy storage function. Specifically, the coupling term of the load swing angle is introduced to improve the system's ability to suppress the load swing. At the same time, considering the influence of air resistance, an adaptive term is introduced to estimate The influence of air resistance on the system; the nonlinear adaptive controller obtained according to the above steps can ensure that the system achieves the goals of aircraft positioning and load swing suppression;
[0046] Further, combined with the form of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More