Control method of parallel bionic mobile robot with adjustable gravity center
A mobile robot and control method technology, which is applied in non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve the problems of complex wheel parts, etc., so as to improve the ability to pass obstacles and improve flexibility. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
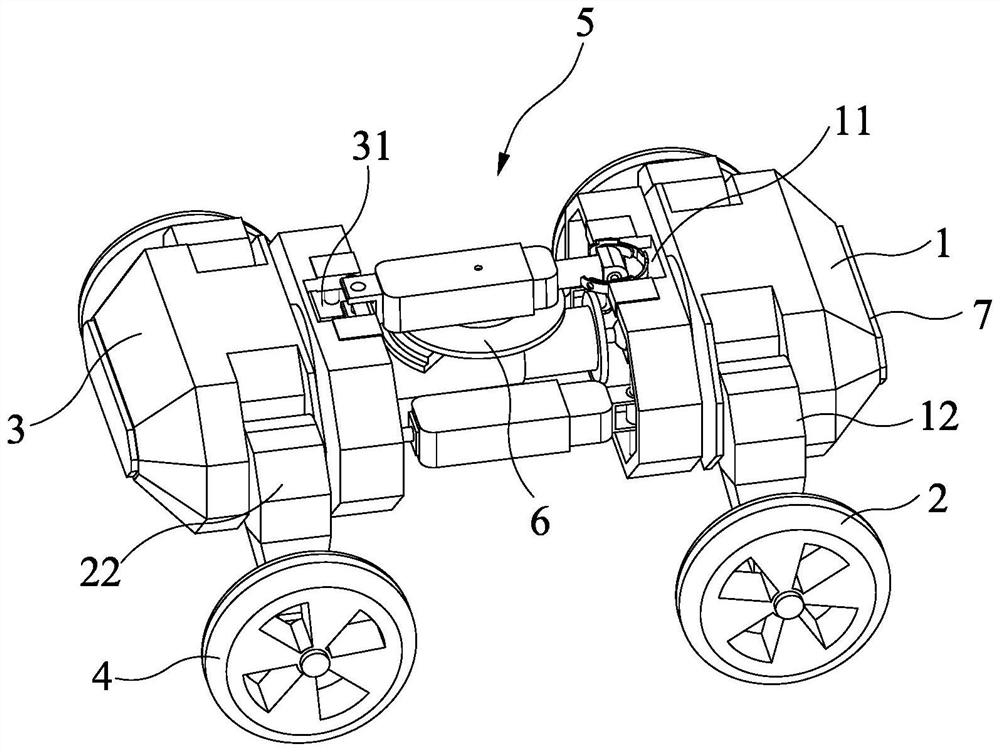
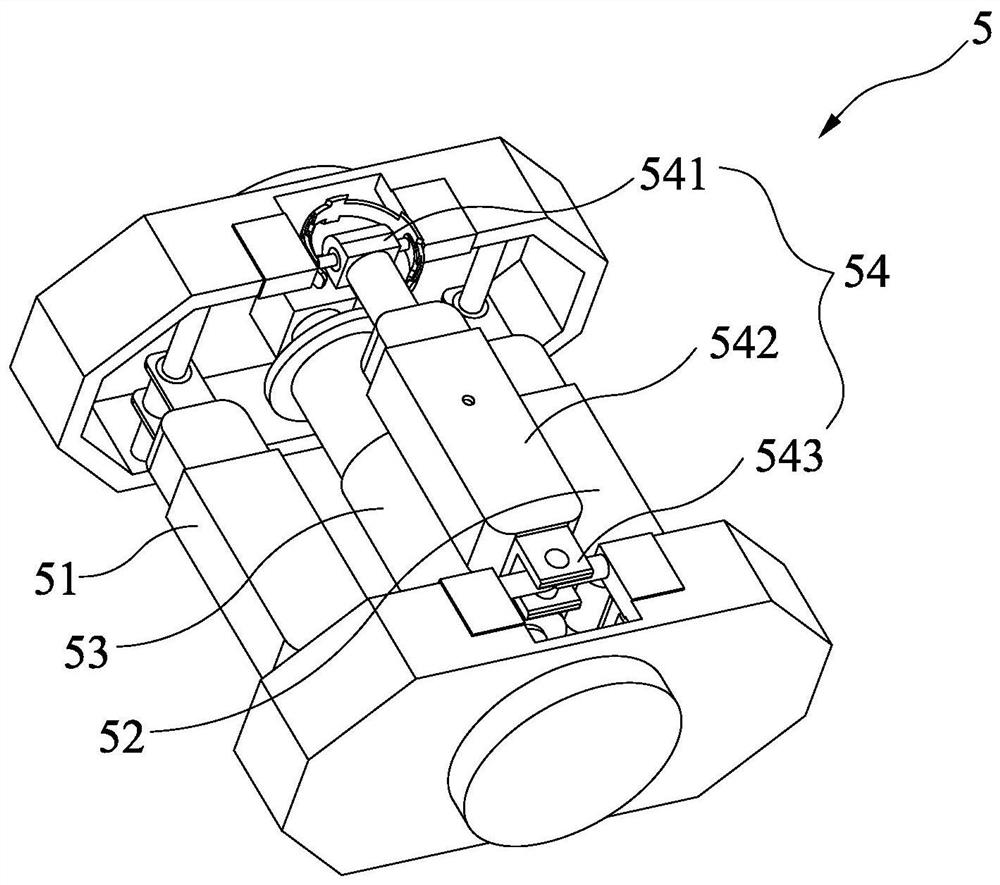
[0028] The invention provides a control method of a parallel bionic mobile robot with an adjustable center of gravity, such as figure 2 As shown, a parallel bionic mobile robot with an adjustable center of gravity includes a front body 1 with front wheels 2 installed on both sides, a rear body 3 with rear wheels 4 installed on both sides, a wheel unit, a reconfigurable parallel bionic torso 5, and a center of gravity Adjusting device 6 and master control panel 7, such as figure 2 shown;
[0029] combine Figure 7 with Figure 8, the wheel unit includes a front wheel frame 12, a front wheel drive assembly (not shown), a rear wheel frame 22, a rear wheel drive assembly, the front wheel 2 is installed on the front wheel frame 12, the The front wheel frame 12 is connected to the front vehicle body 1, the rear wheel 4 is installed on the rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More