

An intelligent robot for cleaning urban pipelines with variable direction tracking
An intelligent robot and urban technology, applied in the direction of cleaning hollow objects, cleaning methods and appliances, chemical instruments and methods, etc., can solve the problem that the internal transmission mechanism is easily affected by debris in the pipe wall, the structure of the adjustment scale is complex, and the manufacturing cost is high. problems, to achieve the effect of preventing cleaning omissions, avoiding shaking, and good storage performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
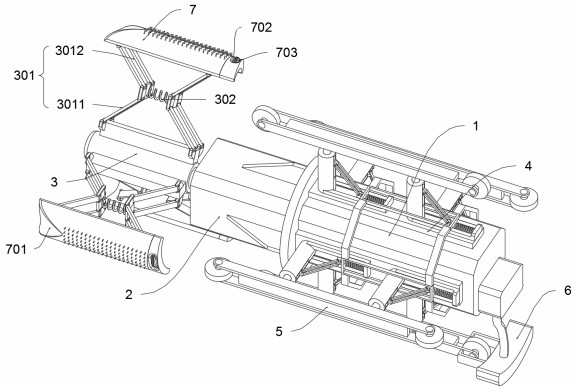
[0035] as attached figure 1 to attach Figure 10 Shown:
[0036] The present invention provides an intelligent urban pipe cleaning robot with variable direction tracking, which includes a center column main body 1, a storage battery is arranged inside the center column main body 1, and the storage battery is connected to a driving part 2, which can be used to realize the power supply to the robot; the driving part The right end of 2 is fixedly connected to the left end of the center column main body 1, and the left end of the driving member 2 is connected to and drives the sweeping mechanism 3. The sweeping mechanism 3 includes a free telescopic frame 301; the positioning support seat 4 is provided with four sets, and the four sets of positioning supports The seat 4 is evenly distributed on the outer surface of the central column main body 1 around the center of the central column main body 1. The positioning support seat 4 includes a guide frame 401; the self-expanding wheel...
Embodiment 2
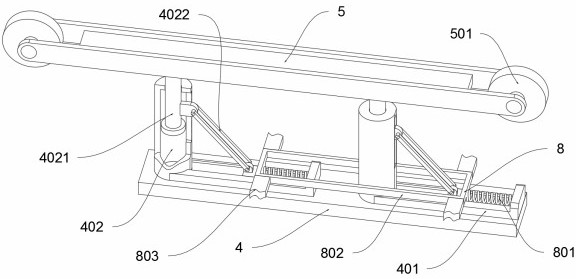
[0041] Embodiment 2: Based on a kind of variable direction tracking urban pipeline cleaning intelligent robot provided in the first embodiment, after the self-expanding wheel frame 5 of the device is automatically expanded, it is necessary to ensure the same expansion for the four self-expanding wheel frames 5 distance, so as to keep the central column main body 1 and the sweeping mechanism 3 in the middle of the pipeline; in order to solve the above problems, combined with Image 6 , this kind of urban pipe cleaning intelligent robot with variable direction tracking also includes: a synchronous connection frame 802 is fixedly connected to two synchronous sliders 8 adjacent to the same group of positioning support bases 4; a synchronous connection rod 803 is fixedly connected to the adjacent On the two synchronous connection frames 802, and four sets of synchronous connection rods 803 are spliced in a ring structure to connect the four synchronous connection frames 802; that ...
Embodiment 3
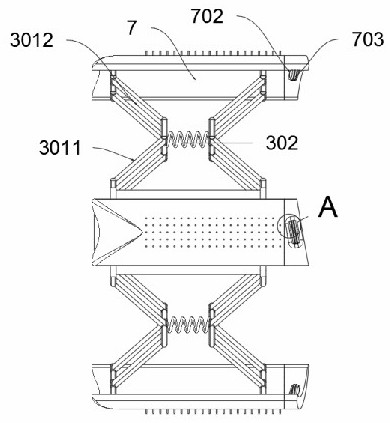
[0042] Embodiment 3: Based on the variable-direction tracking urban pipeline cleaning intelligent robot provided in the first embodiment, when the sweeping mechanism 3 of the device drives the cleaning brush body 7 to rotate, it has the cleaning function while cleaning On the basis of the brush body 7, the structure of the inclined wheel 703 is added, combined with the attached Figure 7 , the inclined wheel 703 is also inclined at ten degrees, and the inclined wheel 703 includes a wheel surface ridge 7031, and the wheel surface ridge 7031 is provided with two places, and the wheel surface ridge 7031 is a ridge with a triangular cross section; Among them, the inclined wheel 703 also contacts the surface of the inner wall of the pipe. Due to the inclination angle of the inclined wheel 703, when the cleaning brush body 7 rotates in the left counterclockwise direction, the inclined wheel 703 can drive the cleaning brush during the rolling process of the inner wall surface of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More