

An Event-triggered Cooperative Control Method for Mixed-Order Nonlinear Systems with Adaptive Thresholds
An adaptive threshold and event-triggered technology, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve problems such as the inability to effectively adjust the system triggering mechanism and control efficiency, and the inability to automatically adjust the triggering threshold. Frequency, the effect of saving control resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
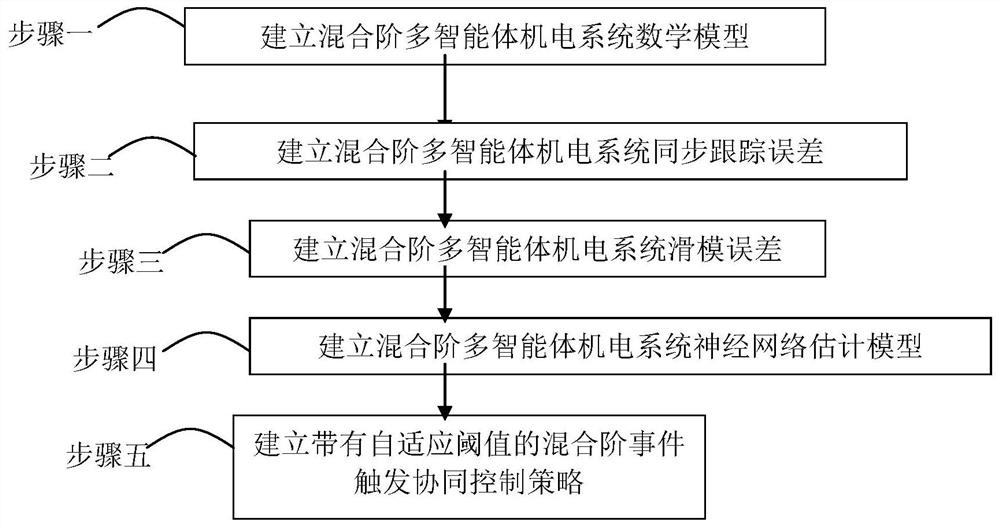
[0047] Embodiment 1: Combining figure 1 This embodiment will be described. The event-triggered collaborative control method for a mixed-order nonlinear system with an adaptive threshold described in this embodiment includes the following steps:
[0048] Step 1. Establish a mathematical model of a mixed-order multi-agent electromechanical system:
[0049] first order system
[0050]
[0051] second order system
[0052]
[0053] p i , v i is the position and velocity of the ith agent, x i is the state vector of the ith agent, f i (x i ) is a nonlinear function, r i is the external disturbance, h i (x i ) is the nonlinear time-varying control coefficient, u i represents the control quantity, M p is the set of first-order agents, M 2 is a collection of second-order agents.
[0054] Step 2. Establish the synchronous tracking error of the hybrid-order multi-agent electromechanical system:
[0055] first-order synchronous tracking error
[0056]
[0057] Seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More